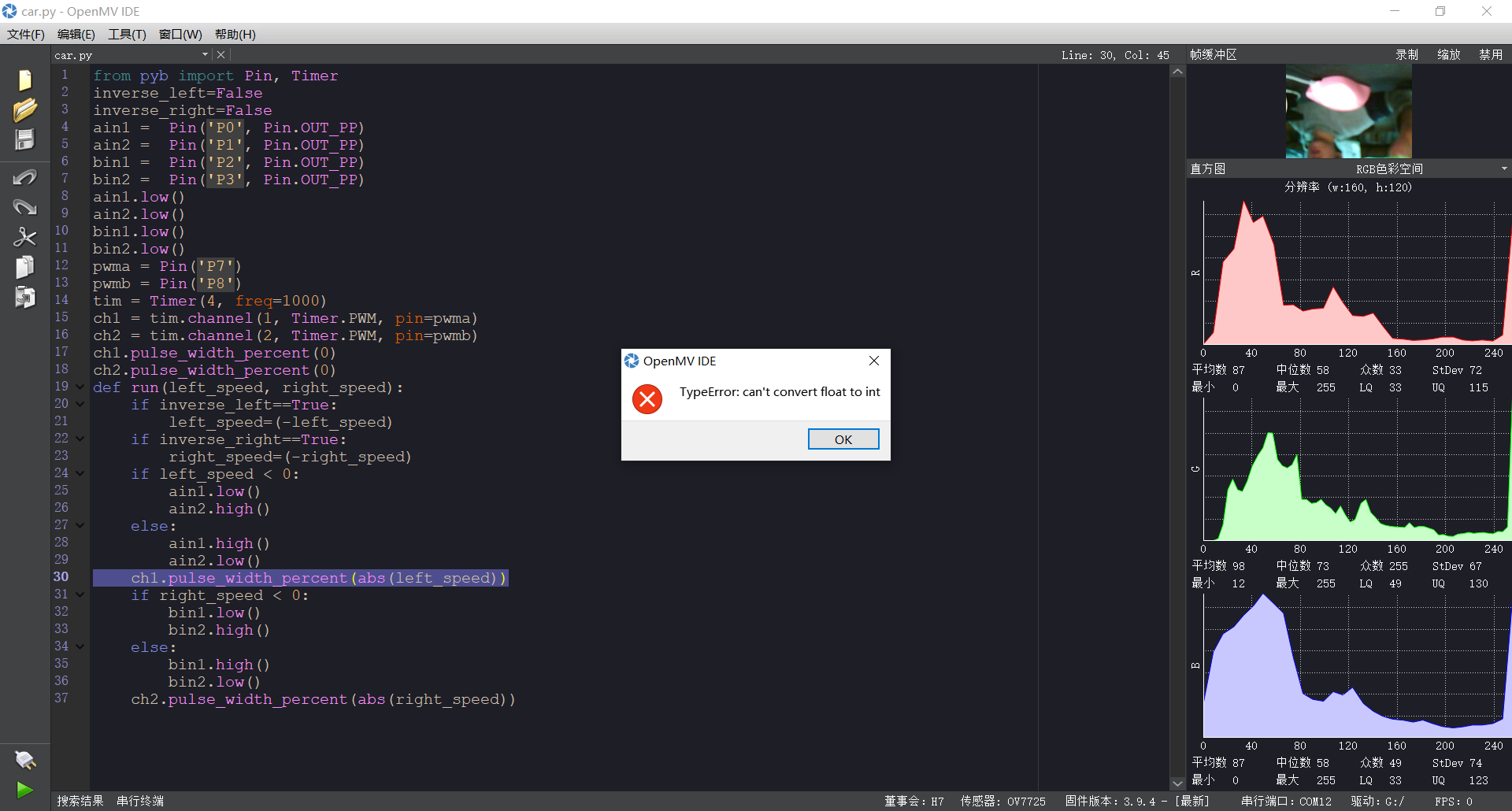
买的追踪绿色小车套件,代码没动,但是现在屏幕中出现绿色就报错,这是怎么回事?
-
-
import sensor, image, time import car from pid import PID sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(10) sensor.set_auto_whitebal(False) clock = time.clock() green_threshold = (76, 96, -110, -30, 8, 66) size_threshold = 2000 x_pid = PID(p=0.5, i=1, imax=100) h_pid = PID(p=0.05, i=0.1, imax=50) def find_max(blobs): max_size=0 for blob in blobs: if blob[2]*blob[3] > max_size: max_blob=blob max_size = blob[2]*blob[3] return max_blob while(True): clock.tick() img = sensor.snapshot() blobs = img.find_blobs([green_threshold]) if blobs: max_blob = find_max(blobs) x_error = max_blob[5]-img.width()/2 h_error = max_blob[2]*max_blob[3]-size_threshold print("x error: ", x_error) img.draw_rectangle(max_blob[0:4]) img.draw_cross(max_blob[5], max_blob[6]) x_output=x_pid.get_pid(x_error,1) h_output=h_pid.get_pid(h_error,1) print("h_output",h_output) car.run(-h_output-x_output,-h_output+x_output) else: car.run(18,-18)
-
from pyb import Pin, Timer inverse_left=False inverse_right=False ain1 = Pin('P0', Pin.OUT_PP) ain2 = Pin('P1', Pin.OUT_PP) bin1 = Pin('P2', Pin.OUT_PP) bin2 = Pin('P3', Pin.OUT_PP) ain1.low() ain2.low() bin1.low() bin2.low() pwma = Pin('P7') pwmb = Pin('P8') tim = Timer(4, freq=1000) ch1 = tim.channel(1, Timer.PWM, pin=pwma) ch2 = tim.channel(2, Timer.PWM, pin=pwmb) ch1.pulse_width_percent(0) ch2.pulse_width_percent(0) def run(left_speed, right_speed): if inverse_left==True: left_speed=(-left_speed) if inverse_right==True: right_speed=(-right_speed) if left_speed < 0: ain1.low() ain2.high() else: ain1.high() ain2.low() ch1.pulse_width_percent(abs(left_speed)) if right_speed < 0: bin1.low() bin2.high() else: bin1.high() bin2.low() ch2.pulse_width_percent(abs(right_speed))
-
from pyb import millis from math import pi, isnan class PID: _kp = _ki = _kd = _integrator = _imax = 0 _last_error = _last_derivative = _last_t = 0 _RC = 1/(2 * pi * 20) def __init__(self, p=0, i=0, d=0, imax=0): self._kp = float(p) self._ki = float(i) self._kd = float(d) self._imax = abs(imax) self._last_derivative = float('nan') def get_pid(self, error, scaler): tnow = millis() dt = tnow - self._last_t output = 0 if self._last_t == 0 or dt > 1000: dt = 0 self.reset_I() self._last_t = tnow delta_time = float(dt) / float(1000) output += error * self._kp if abs(self._kd) > 0 and dt > 0: if isnan(self._last_derivative): derivative = 0 self._last_derivative = 0 else: derivative = (error - self._last_error) / delta_time derivative = self._last_derivative + \ ((delta_time / (self._RC + delta_time)) * \ (derivative - self._last_derivative)) self._last_error = error self._last_derivative = derivative output += self._kd * derivative output *= scaler if abs(self._ki) > 0 and dt > 0: self._integrator += (error * self._ki) * scaler * delta_time if self._integrator < -self._imax: self._integrator = -self._imax elif self._integrator > self._imax: self._integrator = self._imax output += self._integrator return output def reset_I(self): self._integrator = 0 self._last_derivative = float('nan')
-
更新一下代码:
https://book.openmv.cc/project/zhui-xiao-qiu-de-xiao-8f665d28-project-pan-tilt-md.html
car.py改成网页里的就行。