openmv接受字符串时,为啥会报错
-
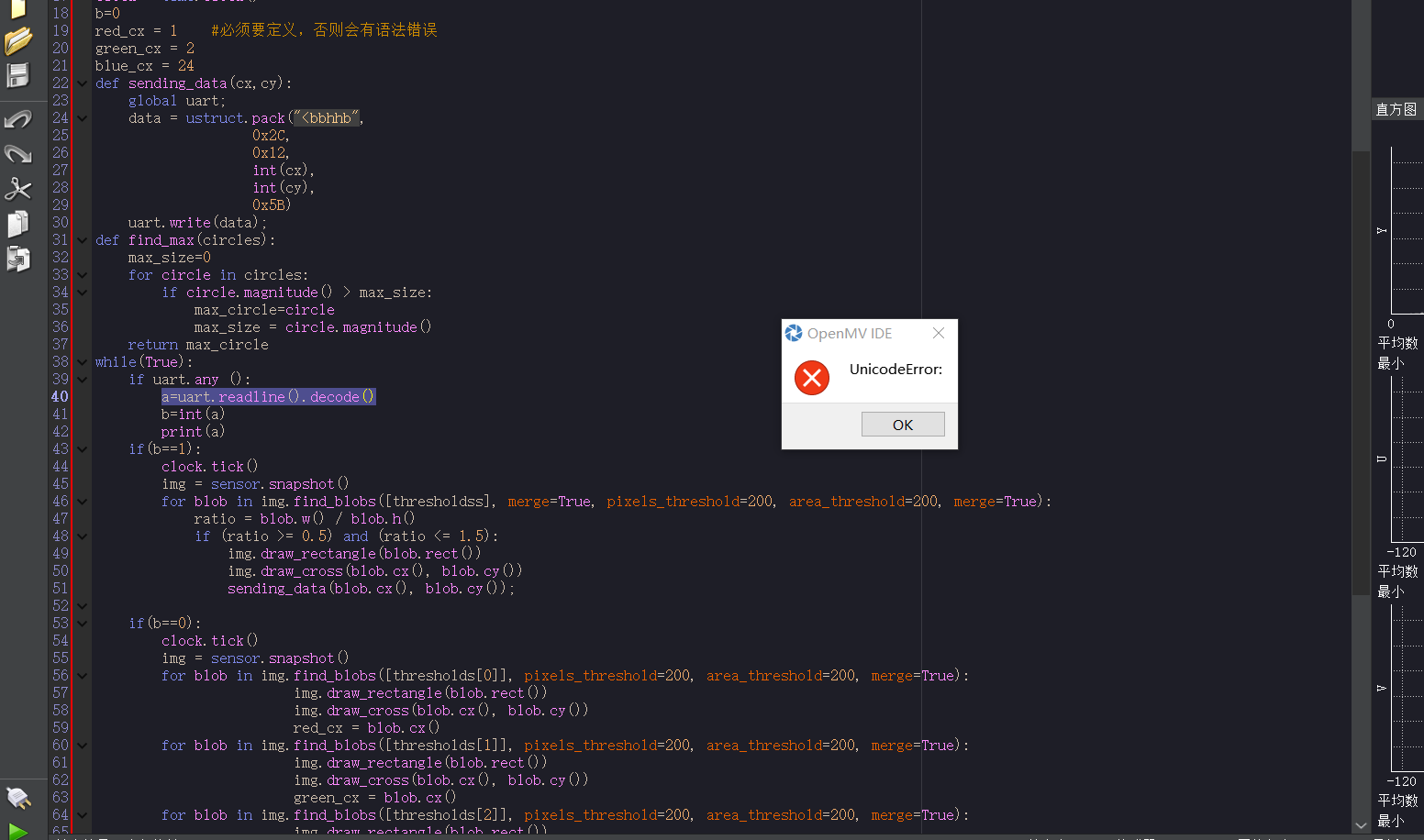
import sensor, image, time, math from pyb import UART import json import ustruct uart = UART(1,115200) uart.init(115200, bits=8, parity=None, stop=1) thresholdss = (4, 15, 4, 28, 1, 19) thresholds = [(12, 50, 30, 79, 12, 127), # generic_red_thresholds (4, 94, -87, -20, -28, 27), # generic_green_thresholds (21, 54, -37, 51, -87, -13)] # generic_blue_thresholds sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) sensor.set_auto_whitebal(False) clock = time.clock() b=0 red_cx = 1 #必须要定义,否则会有语法错误 green_cx = 2 blue_cx = 24 def sending_data(cx,cy): global uart; data = ustruct.pack("<bbhhb", 0x2C, 0x12, int(cx), int(cy), 0x5B) uart.write(data); def find_max(circles): max_size=0 for circle in circles: if circle.magnitude() > max_size: max_circle=circle max_size = circle.magnitude() return max_circle while(True): if uart.any (): a=uart.readline().decode() b=int(a) print(a) if(b==1): clock.tick() img = sensor.snapshot() for blob in img.find_blobs([thresholdss], merge=True, pixels_threshold=200, area_threshold=200, merge=True): ratio = blob.w() / blob.h() if (ratio >= 0.5) and (ratio <= 1.5): img.draw_rectangle(blob.rect()) img.draw_cross(blob.cx(), blob.cy()) sending_data(blob.cx(), blob.cy()); if(b==0): clock.tick() img = sensor.snapshot() for blob in img.find_blobs([thresholds[0]], pixels_threshold=200, area_threshold=200, merge=True): img.draw_rectangle(blob.rect()) img.draw_cross(blob.cx(), blob.cy()) red_cx = blob.cx() for blob in img.find_blobs([thresholds[1]], pixels_threshold=200, area_threshold=200, merge=True): img.draw_rectangle(blob.rect()) img.draw_cross(blob.cx(), blob.cy()) green_cx = blob.cx() for blob in img.find_blobs([thresholds[2]], pixels_threshold=200, area_threshold=200, merge=True): img.draw_rectangle(blob.rect()) img.draw_cross(blob.cx(), blob.cy()) blue_cx = blob.cx() if red_cx > green_cx and green_cx > blue_cx : print("123") uart.write("a\r\n") elif red_cx > blue_cx and blue_cx > green_cx : print("132") uart.write("b\r\n") elif green_cx > blue_cx and blue_cx > red_cx : print("231") uart.write("c\r\n") elif green_cx > red_cx and red_cx > blue_cx : print("213") uart.write("d\r\n") elif blue_cx > green_cx and green_cx > red_cx : print("321") uart.write("e\r\n") elif blue_cx > red_cx and red_cx > green_cx : print("312") uart.write("f\r\n")
-
因为接收到的不是unicode字符串,你在第40行上看看读取的是啥。
a = uart.readline() print(a) a = a.decode()