使用舵机的时候出现了这个问题,舵机的源代码,买的舵机扩展版
-
舵机主函数代码
# Servo Shield Example. # # This example demonstrates the servo shield. Please follow these steps: # # 1. Connect a servo to any PWM output. # 2. Connect a 3.7v battery (or 5V source) to VIN and GND. # 3. Copy pca9685.py and servo.py to OpenMV and reset it. # 4. Connect and run this script in the IDE. import time , sensor from servo import Servos from machine import I2C, Pin sensor.reset() sensor.set_pixformat(sensor.RGB565) #sensor.set_pixformat(sensor.GRAYSCALE) sensor.set_framesize(sensor.VGA) sensor.set_windowing((100 ,100)) sensor.set_vflip(True) #水平竖直翻转 sensor.set_hmirror(True) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking clock = time.clock() i2c = I2C(sda=Pin('P5'), scl=Pin('P4')) servo = Servos(i2c, address=0x40, freq=50, min_us=500, max_us=2500, degrees=180) while True: clock.tick() img = sensor.snapshot() servo.position(7, 180) sensor.skip_frames(time = 1000) time.sleep(1000) servo.position(7, 90) sensor.skip_frames(time = 1000) time.sleep(1000) print(clock.fps()) #servo.position(0, 120) #time.sleep(1000) #servo.position(0, 90) #time.sleep(1000)PCA9685代码
import utime import ustruct class PCA9685: def __init__(self, i2c, address=0x40): self.i2c = i2c self.address = address self.reset() def _write(self, address, value): self.i2c.writeto_mem(self.address, address, bytearray([value])) def _read(self, address): return self.i2c.readfrom_mem(self.address, address, 1)[0] def reset(self): self._write(0x00, 0x00) def freq(self, freq=None): if freq is None: return int(25000000.0 / 4096 / (self._read(0xfe) - 0.5)) prescale = int(25000000.0 / 4096.0 / freq + 0.5) old_mode = self._read(0x00) self._write(0x00, (old_mode & 0x7F) | 0x10) self._write(0xfe, prescale) self._write(0x00, old_mode) utime.sleep_us(5) self._write(0x00, old_mode | 0xa1) def pwm(self, index, on=None, off=None): if on is None or off is None: data = self.i2c.readfrom_mem(self.address, 0x06 + 4 * index, 4) return ustruct.unpack('<HH', data) data = ustruct.pack('<HH', on, off) self.i2c.writeto_mem(self.address, 0x06 + 4 * index, data) def duty(self, index, value=None, invert=False): if value is None: pwm = self.pwm(index) if pwm == (0, 4096): value = 0 elif pwm == (4096, 0): value = 4095 value = pwm[1] if invert: value = 4095 - value return value if not 0 <= value <= 4095: raise ValueError("Out of range") if invert: value = 4095 - value if value == 0: self.pwm(index, 0, 4096) elif value == 4095: self.pwm(index, 4096, 0) else: self.pwm(index, 0, value)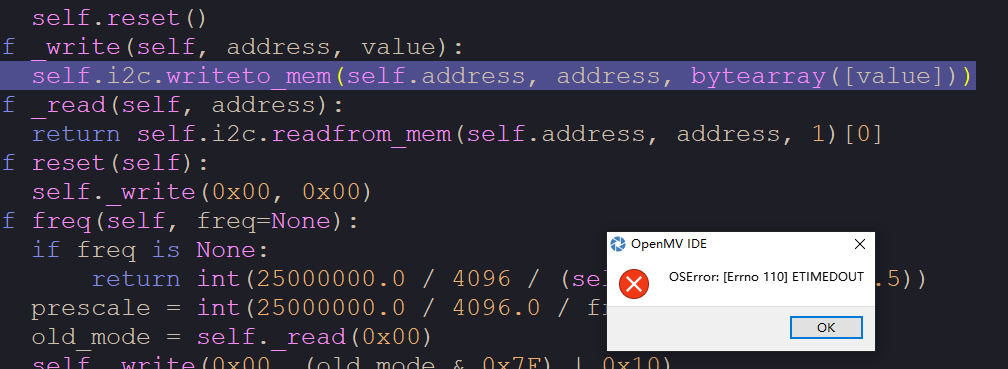
-
看上去没插好。