为什么更新IDE后采集速度没有变化?
-
运行hello world。
-
运行这个代码速度不能达到吗?
-
不同的代码不一样。
你的代码里,sensor.get_exposure_us()耗时,删掉。
曝光时间和帧率也有关系。sensor.set_auto_exposure(False,exposure_us=100)改一下。
具体怎么改看你的需求。
-
串口发送“uart = UART(3,115200)”,这一行就导致速度提不上去,但这行又不能缺少,有办法解决吗?
-
uart.write(output_str+'\n')发送数据会变慢。你可以换一下协议,发送二进制。
这个代码是可以的。while(True): clock.tick()# Track elapsed milliseconds between snapshots(). img = sensor.snapshot()#binary([thresholds], invert=True, zero=True) blobs=img.find_blobs([thresholds],pixels_threshold=200,area_threshold=250) if blobs: max_blob=find_max(blobs) output = bytes([0xFF,max_blob.cx(),max_blob.cy()]) print('you send:',output) uart.write(output) print("FPS:", clock.fps())
-
好像还是不行,有了uart = UART(3,115200)就会变慢
# 红外RGB565跟踪示例 # # 这个例子展示了使用OpenMV Cam进行红外RGB565跟踪。 import sensor, image import time from pyb import UART import json import utime import pyb thresholds = (100,100,0,0,0,0) # thresholds for bright white light from IR. TimeBin = [0,0] TimeBox = [0,0] sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQQVGA) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking sensor.skip_frames(time = 10) #sensor.get_exposure_us()#以毫秒为单位返回曝光率 #sensor.set_auto_exposure(False,exposure_us=1)#设置曝光 #sensor.set_auto_exposure(False, \ # exposure_us = int(current_exposure_time_in_microseconds* EXPOSURE_TIME_SCALE)) clock = time.clock() # Tracks FPS. uart = UART(3,115200) def find_max(blobs): max_size=0 for blob in blobs: if blob.pixels() >max_size: max_blob=blob max_size = blob.pixels() return max_blob while(True): clock.tick()# Track elapsed milliseconds between snapshots(). img = sensor.snapshot()#binary([thresholds], invert=True, zero=True) blobs=img.find_blobs([thresholds],pixels_threshold=200,area_threshold=250) if blobs: #output_str = json.dumps(blobs) max_blob=find_max(blobs) output = bytes([0xFF,max_blob.cx(),max_blob.cy()]) img.draw_rectangle(max_blob.rect(),color=(255,0,0)) #output_str="[%d,%d]" % (max_blob.cx(),max_blob.cy()) print('you send:',output) uart.write(output) TimeBin[1] = TimeBin[0] TimeBin[0] = utime.ticks_ms() delta= utime.ticks_diff(TimeBin[0], TimeBin[1]) print('duration:',delta) print("FPS:", clock.fps()) #img.draw_cross(blob.cx(), blob.cy()) #else: #print('not found!')
-
测试代码:
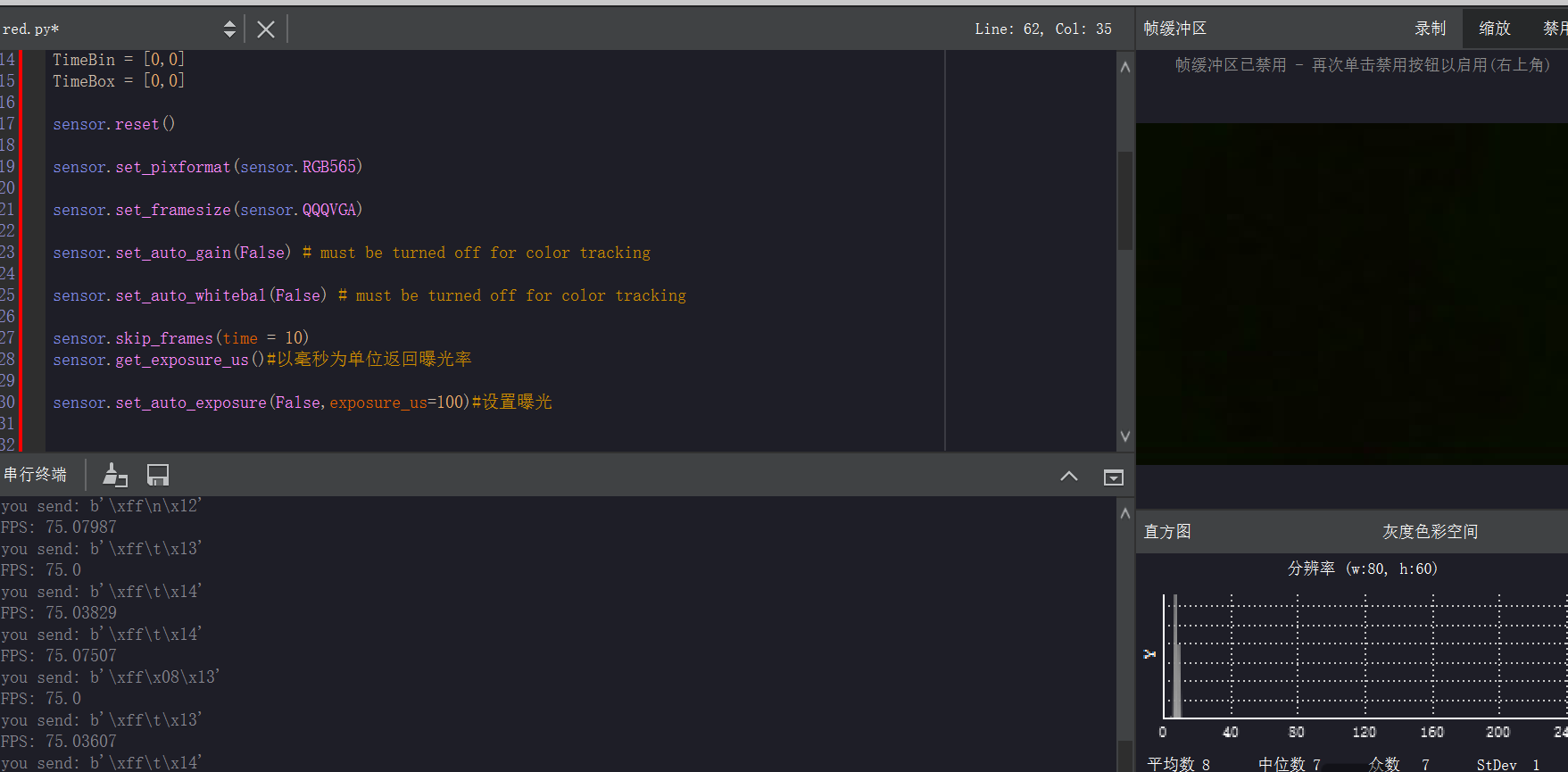
# 红外RGB565跟踪示例 # # 这个例子展示了使用OpenMV Cam进行红外RGB565跟踪。 import sensor, image import time #from numba import jit from pyb import UART import json import utime import pyb #EXPOSURE_TIME_SCALE = 0.1 thresholds = (100,100,0,0,0,0) # thresholds for bright white light from IR. TimeBin = [0,0] TimeBox = [0,0] sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQQVGA) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking sensor.skip_frames(time = 10) sensor.get_exposure_us()#以毫秒为单位返回曝光率 sensor.set_auto_exposure(False,exposure_us=100)#设置曝光 #sensor.set_auto_exposure(False, \ # exposure_us = int(current_exposure_time_in_microseconds* EXPOSURE_TIME_SCALE)) clock = time.clock() # Tracks FPS. uart = UART(3,115200) def find_max(blobs): max_size=0 for blob in blobs: if blob.pixels() >max_size: max_blob=blob # max_size = blob.pixels() return max_blob while(True): clock.tick()# Track elapsed milliseconds between snapshots(). img = sensor.snapshot()#binary([thresholds], invert=True, zero=True) blobs=img.find_blobs([thresholds],pixels_threshold=200,area_threshold=250) if blobs: max_blob=find_max(blobs) output = bytes([0xFF,max_blob.cx(),max_blob.cy()]) print('you send:',output) uart.write(output) print("FPS:", clock.fps())测试结果:FPS: 136.1621

-
为什么我还是75?只有一次是136
-
不知道具体情况,建议联系卖家,把产品寄回去测试。
-
OpenMV4 ov7725 hello world可以到150帧,加入其他的代码不能保证是150帧。