NameError: local variable referenced before assignment
-
import sensor, image, time, math,pyb from pyb import UART uart=UART(3,1382400)#其中3为总线固定值,9600为波特率可改 sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQVGA) # we run out of memory if the resolution is much bigger... sensor.skip_frames(30) sensor.set_auto_gain(False) # must turn this off to prevent image washout... sensor.set_auto_whitebal(False) # must turn this off to prevent image washout... clock = time.clock() ##########数据初始化#########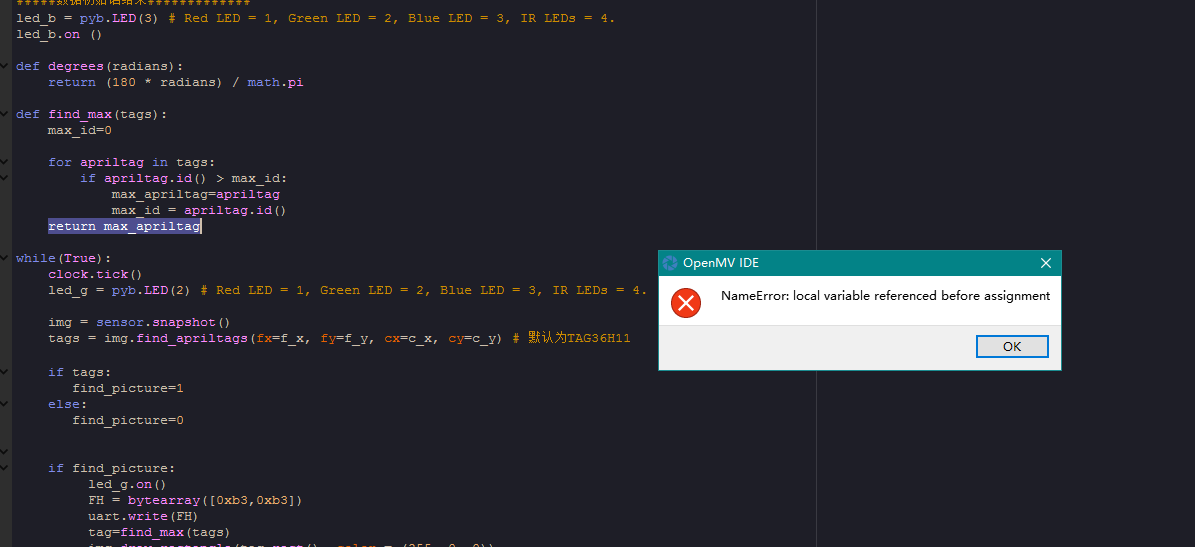 f_x = (2.8 / 3.984) * 160 # 默认值 f_y = (2.8 / 2.952) * 120 # 默认值 c_x = 160 * 0.5 # 默认值(image.w * 0.5) c_y = 120 * 0.5 # 默认值(image.h * 0.5) k=10.638 oldx=0 oldy=0 oldyh=0 oldyl=0 oldz=0 oldm=0 oldn=0 x=0 y=0 yh=0 yl=0 z=0 m=0 n=0 #####数据初始话结束############# led_b = pyb.LED(3) # Red LED = 1, Green LED = 2, Blue LED = 3, IR LEDs = 4. led_b.on () def degrees(radians): return (180 * radians) / math.pi def find_max(tags): max_id=0 for apriltag in tags: if apriltag.id() > max_id: max_apriltag=apriltag max_id = apriltag.id() return max_apriltag while(True): clock.tick() led_g = pyb.LED(2) # Red LED = 1, Green LED = 2, Blue LED = 3, IR LEDs = 4. img = sensor.snapshot() tags = img.find_apriltags(fx=f_x, fy=f_y, cx=c_x, cy=c_y) # 默认为TAG36H11 if tags: find_picture=1 else: find_picture=0 if find_picture: led_g.on() FH = bytearray([0xb3,0xb3]) uart.write(FH) tag=find_max(tags) img.draw_rectangle(tag.rect(), color = (255, 0, 0)) img.draw_cross(tag.cx(), tag.cy(), color = (0, 255, 0)) zt=tag.z_translation() xt=tag.x_translation() yt=tag.y_translation() length =k*math.sqrt(zt*zt+xt*xt+yt*yt) x=int(length) y=int(degrees(tag.y_rotation())) yh=int(y/100) yl=int(y%100) z=tag.cx() m=tag.cy() n=tag.id() oldx=x oldy=y oldyh=yh oldyl=yl oldz=z oldm=m oldn=n data = bytearray([z,m,n,x,yh,yl]) uart.write(data) print('x=',z,'y=',m,'length=',length,'ID=',tag.id()) print_args = (tag.x_translation(), tag.y_translation(), tag.z_translation(),\ degrees(tag.x_rotation()), yh,yl, degrees(tag.z_rotation())) # 位置的单位是未知的,旋转的单位是角度 print("Tx: %f, Ty %f, Tz %f, Rx %f, Ryh %f,Ryl %f, Rz %f" % print_args) print('find_picture=',find_picture) else: led_g.off() FH = bytearray([0xb3,0xb3]) uart.write(FH) #img.draw_rectangle(tag.rect(), color = (255, 0, 0)) #img.draw_cross(tag.cx(), tag.cy(), color = (0, 255, 0)) data = bytearray([oldz,oldm,oldn,oldx,oldyh,oldyl]) uart.write(data) print('x=',oldz,'y=',oldm,'ID=',oldn,'length=',oldx,'yh=',yh,'yl=',yl,'find_picture=',find_picture) print('find_picture=',find_picture) #print_args = (tag.x_translation(), tag.y_translation(), tag.z_translation(),\ #degrees(tag.x_rotation()),yh,yl, degrees(tag.z_rotation())) # 位置的单位是未知的,旋转的单位是角度 #print("Tx: %f, Ty %f, Tz %f, Rx %f, Ryh %f,Ryl %f, Rz %f" % print_args)return max_apriltag这里报错有大佬能帮一下吗,完全懵了
-
def find_max(tags): max_id=0 max_apriltag = None for apriltag in tags: if apriltag.id() > max_id: max_apriltag=apriltag max_id = apriltag.id() return max_apriltag