识别车道线杂线太多求助
-
-
能不能像巡线小车例程那样用线性回归返回直线
不过却需要返回多条line对象
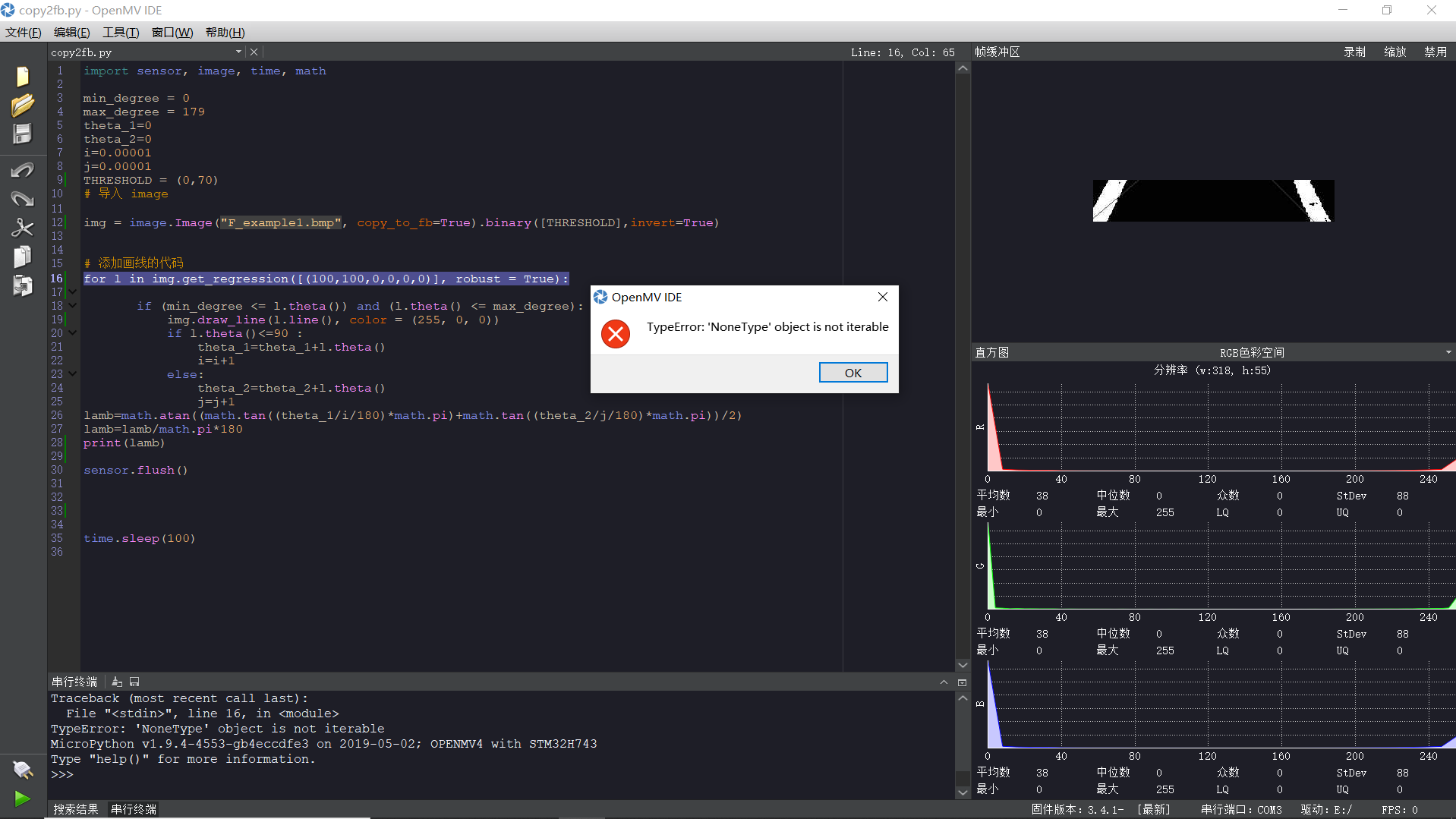
我们需要两条直线对象计算偏转角度mport sensor, image, time, math min_degree = 0 max_degree = 179 theta_1=0 theta_2=0 i=0.00001 j=0.00001 THRESHOLD = (0,70) # 导入 image img = image.Image("F_example1.bmp", copy_to_fb=True).binary([THRESHOLD],invert=True) # 添加画线的代码 for l in img.get_regression([(100,100,0,0,0,0)], robust = True): if (min_degree <= l.theta()) and (l.theta() <= max_degree): img.draw_line(l.line(), color = (255, 0, 0)) if l.theta()<=90 : theta_1=theta_1+l.theta() i=i+1 else: theta_2=theta_2+l.theta() j=j+1 lamb=math.atan((math.tan((theta_1/i/180)*math.pi)+math.tan((theta_2/j/180)*math.pi))/2) lamb=lamb/math.pi*180 print(lamb) sensor.flush()  time.sleep(100) 
-
第十六行这个100,100,0,0,0,0是什么意思
-
get_regression只能返回一条直线。
你可以分成左右两边分别调用get_regression
-
此回复已被删除!
-
此回复已被删除!
-
此回复已被删除!