为何串口调试助手显示数据与其传输数据不符?
-
由于时间以及资金问题,我采用了将openmv直接通过蓝牙模块传输至电脑PC端以查看其串口输出数据,但串口调试助手的显示数据与我所输出的数据不符。示波器显示有数据输出。
示波器: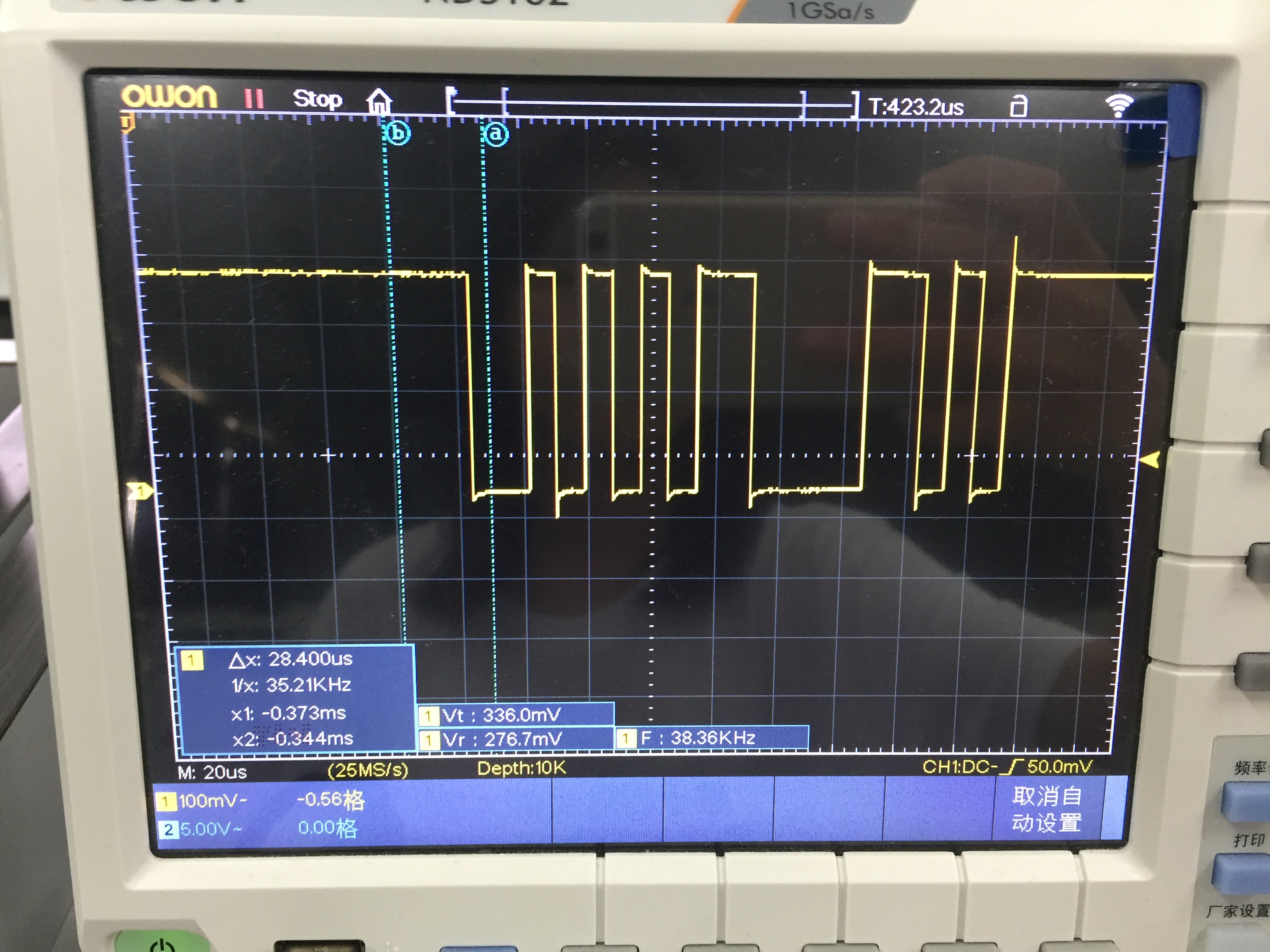
串口显示数据:
openmv代码:
# Untitled - By: 小柱 - 周三 4月 17 2019 import sensor, image, time from pyb import UART import json threshold = [(37, 67, 45, 84, 4, 68), #red (34, 67, -55, -22, 2, 41), #green (25, 67, -37, 26, -63, -26)] #blue #设置红色的阈值,括号里面的数值分别是L A B 的最大值和最小值(minL, maxL, minA, # maxA, minB, maxB),LAB的值在图像左侧三个坐标图中选取。如果是灰度图,则只需 #设置(min, max)两个数字即可。 sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.skip_frames(time = 2000 ) sensor.set_auto_whitebal(False) #关闭白平衡。白平衡是默认开启的,在颜色识别中,需要关闭白平衡。 clock = time.clock() uart = UART(3, 115200) uart.init(115200, bits=8, parity=None, stop=1) #8位数据位,无校验位,1位停止位、 while(True): clock.tick() img = sensor.snapshot() blob = img.find_blobs(threshold, area_threshold=300) if blob: #如果找到了目标颜色 # print(blob) # uart.write("B3 B3 ") #一帧数据的帧头 FH = bytearray([0xb3,0xb3]) uart.write(FH) for b in blob: #迭代找到的目标颜色区域 img.draw_rectangle(b[0:4]) # rect img.draw_cross(b[5], b[6]) # cx, cy x = b.cx() y = b.cy() print(x, y, end = ',') data = bytearray([x,y]) uart.write(data) #uart.write("%x %x \r"%(x,y)) #以16进制的格式输出,(16进制不能这样输出啊,浪费了我两天的时间) #img.draw_circle((50, 50, 30), color = (250, 0, 0)) print(clock.fps())
-
中间环节太多,我也不知道哪里的问题。
-
此回复已被删除!