为什么图像的像素点少于某个值(且不为零)程序就会崩溃
-
import sensor, image, time from pyb import LED from pyb import UART,Timer import Message from pid import PID rho_pid = PID(p=5.0, i=0.1, d=0.3) #控制rol theta_pid = PID(p=3.0, i=0.2)#控制yaw sensor.reset() sensor.set_pixformat(sensor.GRAYSCALE) sensor.set_framesize(sensor.QQQVGA) sensor.set_vflip(False) sensor.set_hmirror(False) sensor.skip_frames(time = 2000) # let auto-gain/auto-white-balance run before using images yanse=(0,100) class zhixian(): angle=0 yaw=0 pitch=0 magnitude=0 a1=0 a2=0 b1=0 b2=0 c1=0 c2=0 last_x=0 last_y=0 rho=0 angle=0 yaw=0 rho_err=0 angle_err=0 yaw_err=0 clock = time.clock() lx=zhixian() i=0 while True: clock.tick() img = sensor.snapshot().binary([yanse])#二值化 i=0 last_x=0 last_y=0 rho=0 angle=0 x=0 y=0 maxbo=0 #blobs = img.find_blobs([(250,255)],merge=True) #for b in blobs : #if maxbo<b.pixels(): #maxbo=b.pixels() #if maxbo>20 : for l in img.find_lines(threshold = 1000, theta_margin = 50, rho_margin = 50) : i=i+1 #if(min_degree <= l.theta()) and (l.theta() <= max_degree): if i==1: #img.draw_line(l.line(), color = (255, 0, 0)) a1=l[3]-l[1]; b1=l[0]-l[2]; c1=l[2]*l[1]-l[0]*l[3]; elif i==2 : a2=l[3]-l[1]; b2=l[0]-l[2]; c2=l[2]*l[1]-l[0]*l[3]; else: img.draw_line(l.line(), color = (255, 0, 0)); if i>1 : if((a1*b2-a2*b1)!=0 and (a1*b2-a2*b1)!=0): img.draw_cross(int((b1*c2-b2*c1)/(a1*b2-a2*b1)),int((c1*a2-c2*a1)/(a1*b2-a2*b1)),10,color=[255,0,0]); last_x=int((b1*c2-b2*c1)/(a1*b2-a2*b1)); last_y=int((c1*a2-c2*a1)/(a1*b2-a2*b1)); Message.UartSendData(Message.DotDataPack(last_y,last_x,0)) print(2, last_x, last_y ) elif i==1 : lines = img.get_regression([(255,255)],robust = True) # print(lines.line()) #lx.yaw=lines.theta() #lx.pitch=lines.rho() #lx.magnitude=lines.magnitude() #rho_err = abs(lines.rho())-img.width()/2 #if lines.theta()>90: #angle_err = lines.theta()-180 #else: #angle_err = lines.theta() #if lines.magnitude()>8: ##if -40<b_err<40 and -30<t_err<30: #rho = rho_pid.get_pid(lines.rho(),1) #正值->右移 rol #angle = theta_pid.get_pid(angle_err,1) #正值->右转 yaw ##for ls in lines: rho=lines.rho() angle=lines.theta() Message.UartSendData(Message.DotDataPack(20,int(rho),int(angle))) #print(1, rho, angle ) print(clock.fps())
-
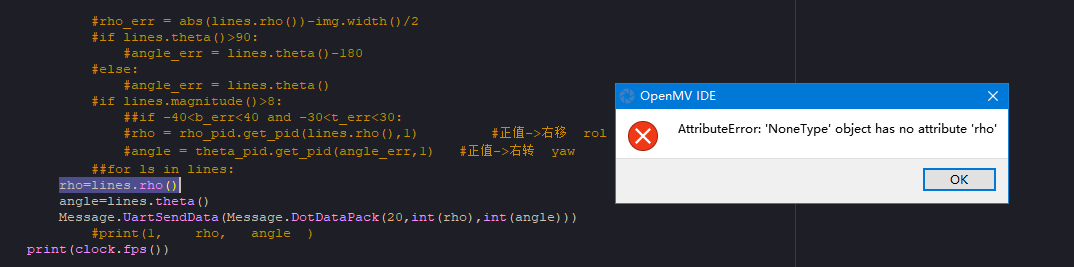
代码不对啊。
如果get_regression没有找到,你的代码里的lines就是空的。空的自然没有rho和theta。
另外,get_regression返回的是一条线,而不是很多线,所以应该是line而不是lines。参考代码:
https://book.openmv.cc/project/follow-lines.html#调整参数,实现跟随