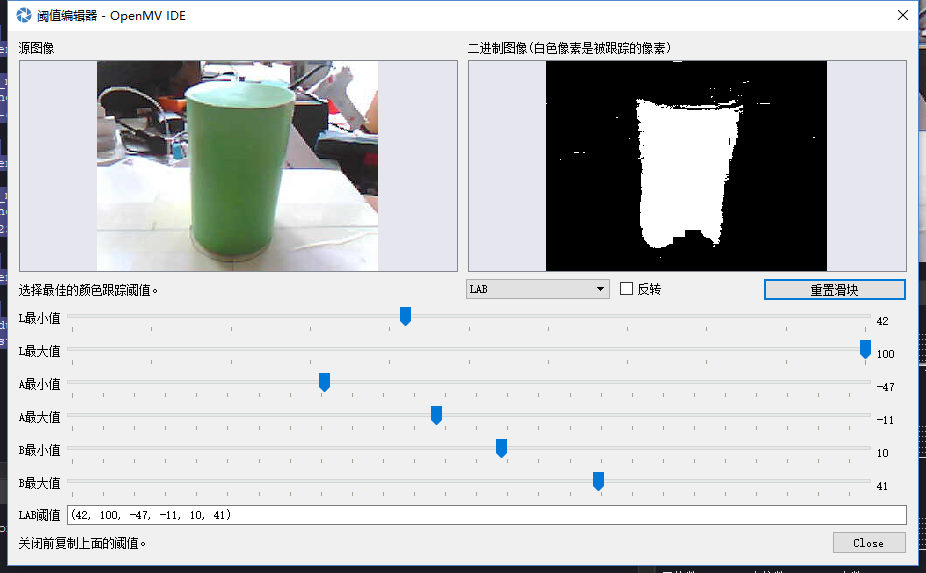
为什么摄像头拍摄到的颜色跟设置的阈值能够对应,但是就是识别不了呢,或者说是不灵敏 有时能识别到,有时又不能
-
# Multi Color Blob Tracking Example # # This example shows off multi color blob tracking using the OpenMV Cam. import sensor, image, time, math ,pyb from pyb import UART from pyb import Pin import json uart = UART(3, 19200) led1 = pyb.LED(1) led2 = pyb.LED(2) led3 = pyb.LED(3) # Color Tracking Thresholds (L Min, L Max, A Min, A Max, B Min, B Max) # The below thresholds track in general red/green things. You may wish to tune them... thresholds = [(42,100, 29, 65, 12, 50), # generic_red_thresholds28, 89, -52, -2, -8, 50 (42, 65, -47, -11, 10, 41), # generic_green_thresholds 31, 86, -3, 20, -49, 14 (19, 53, -1, 27, -50, 0)] # generic_blue_thresholds 30, 66, 44, 80, 26, 69 # You may pass up to 16 thresholds above. However, it's not really possible to segment any # scene with 16 thresholds before color thresholds start to overlap heavily. sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking ROI=(0,20,100,200) clock = time.clock() p_out = Pin('P7', Pin.OUT_PP)#设置p_out为输出引脚 p_out.high()#设置p_out引脚为高 p_out.high()#设置p_out引脚为高 # Only blobs that with more pixels than "pixel_threshold" and more area than "area_threshold" are # returned by "find_blobs" below. Change "pixels_threshold" and "area_threshold" if you change the # camera resolution. Don't set "merge=True" becuase that will merge blobs which we don't want here. a=0 b=1 c=2 d=4 n=0 classmates = [] while(True): clock.tick() #led1.on() #led2.on() #led3.on() img = sensor.snapshot() for blob in img.find_blobs(thresholds,roi=ROI,pixels_threshold=200, area_threshold=200): # These values depend on the blob not being circular - otherwise they will be shaky. statistics = img.get_statistics(roi=ROI) if a<1: if 42<statistics.l_mode()<100 and 29<statistics.a_mode()<65 and 12<statistics.b_mode()<50:#if the circle is red img.draw_rectangle(blob.rect(), color = (255, 0, 0))#识别到的红色圆形用红色的圆框出来 #55, 40, 29, 65, 12, 50 #a=a+1 #print(1) 45, 72, 19, 71, -14, 44 a+=1 #a=a+1 print ('a=',a) classmates.append(a) if b<2: if 42<statistics.l_mode()<65 and -47<statistics.a_mode()<-11 and 10<statistics.b_mode()<41:#if the circle is red img.draw_rectangle(blob.rect(), color = (0, 255,0))#识别到的红色圆形用红色的圆框出来 #40, 66, -22, -2, -6, 27 b+=1 print ('b=',b) classmates.append(b) if c<3: if 19<statistics.l_mode()<53 and -1<statistics.a_mode()<27 and -50<statistics.b_mode()<0:#if the circle is red img.draw_rectangle(blob.rect(), color = (0, 0, 255))#识别到的红色圆形用红色的圆框出来 #19, 36, -3, 18, -23, -4 c+=1 print ('c=',c) classmates.append(c) if n<a<b<c: print (classmates) output_str = json.dumps(classmates) uart.write(output_str) m=len(classmates) if m>2: n=1 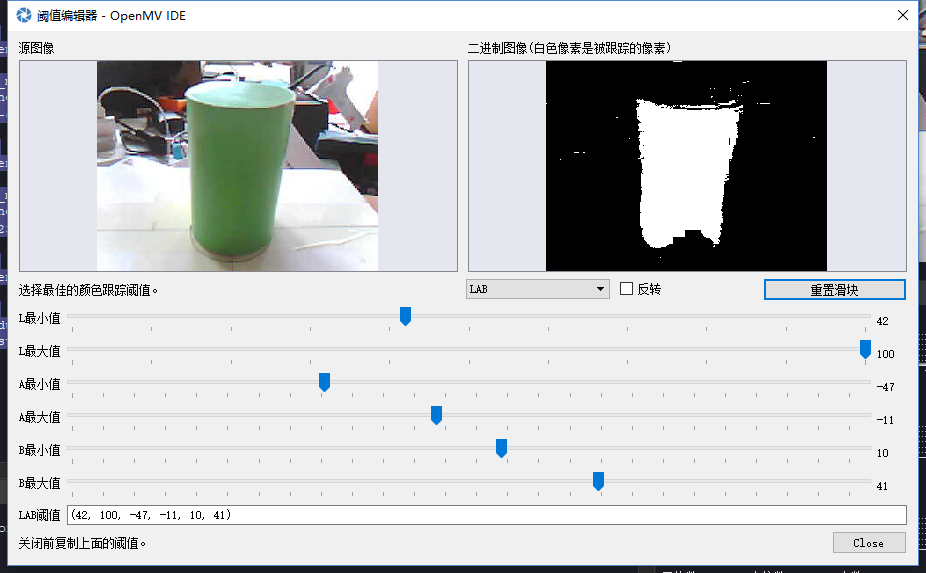
-
-
不要把很多功能放在一起。
我的建议:
先只调用img.find_blobs,print看看得到的是什么。然后print看看statistics的值是什么。