画矩形提示有错误,好像有冲突?
-
Select an area in the Framebuffer to copy the color settings.
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.RGB565) # use RGB565.
sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed.
sensor.skip_frames(10) # Let new settings take affect.
sensor.set_auto_whitebal(False) # turn this off.
#关闭白平衡。白平衡是默认开启的,在颜色识别中,需要关闭白平衡。
clock = time.clock() # Tracks FPS.uart = UART(3, 115200)
while(True):
clock.tick() # Track elapsed milliseconds between snapshots().
img = sensor.snapshot() # Take a picture and return the image.blobs = img.find_blobs([green_threshold]) #find_blobs(thresholds, invert=False, roi=Auto),thresholds为颜色阈值, #是一个元组,需要用括号[ ]括起来。invert=1,反转颜色阈值,invert=False默认 #不反转。roi设置颜色识别的视野区域,roi是一个元组, roi = (x, y, w, h),代表 #从左上顶点(x,y)开始的宽为w高为h的矩形区域,roi不设置的话默认为整个图像视野。 #这个函数返回一个列表,[0]代表识别到的目标颜色区域左上顶点的x坐标,[1]代表 #左上顶点y坐标,[2]代表目标区域的宽,[3]代表目标区域的高,[4]代表目标 #区域像素点的个数,[5]代表目标区域的中心点x坐标,[6]代表目标区域中心点y坐标, #[7]代表目标颜色区域的旋转角度(是弧度值,浮点型,列表其他元素是整型), #[8]代表与此目标区域交叉的目标个数,[9]代表颜色的编号(它可以用来分辨这个 #区域是用哪个颜色阈值threshold识别出来的)。 if blobs: #print('sum : %d'% len(blobs)) for b in blobs: # Draw a rect around the blob. #img.draw_rectangle(b.rect()) # rect img.draw_rectangle(b[0:4]) # rect img.draw_cross(b.cx(), b.cy()) # cx, cy img.draw_cross(int(img.width()/2),int(img.height()/2)) #{(1,22),(-3,33),(22222,0),(9999,12),(0,0)} #data_out = json.dumps(set(data)) uart.writechar(b.cx()) # print(blob[5], blob[6]) # print((img.width()/2), (img.height()/2)) #print('you send:',data_out)else:
# print("not found!")
-
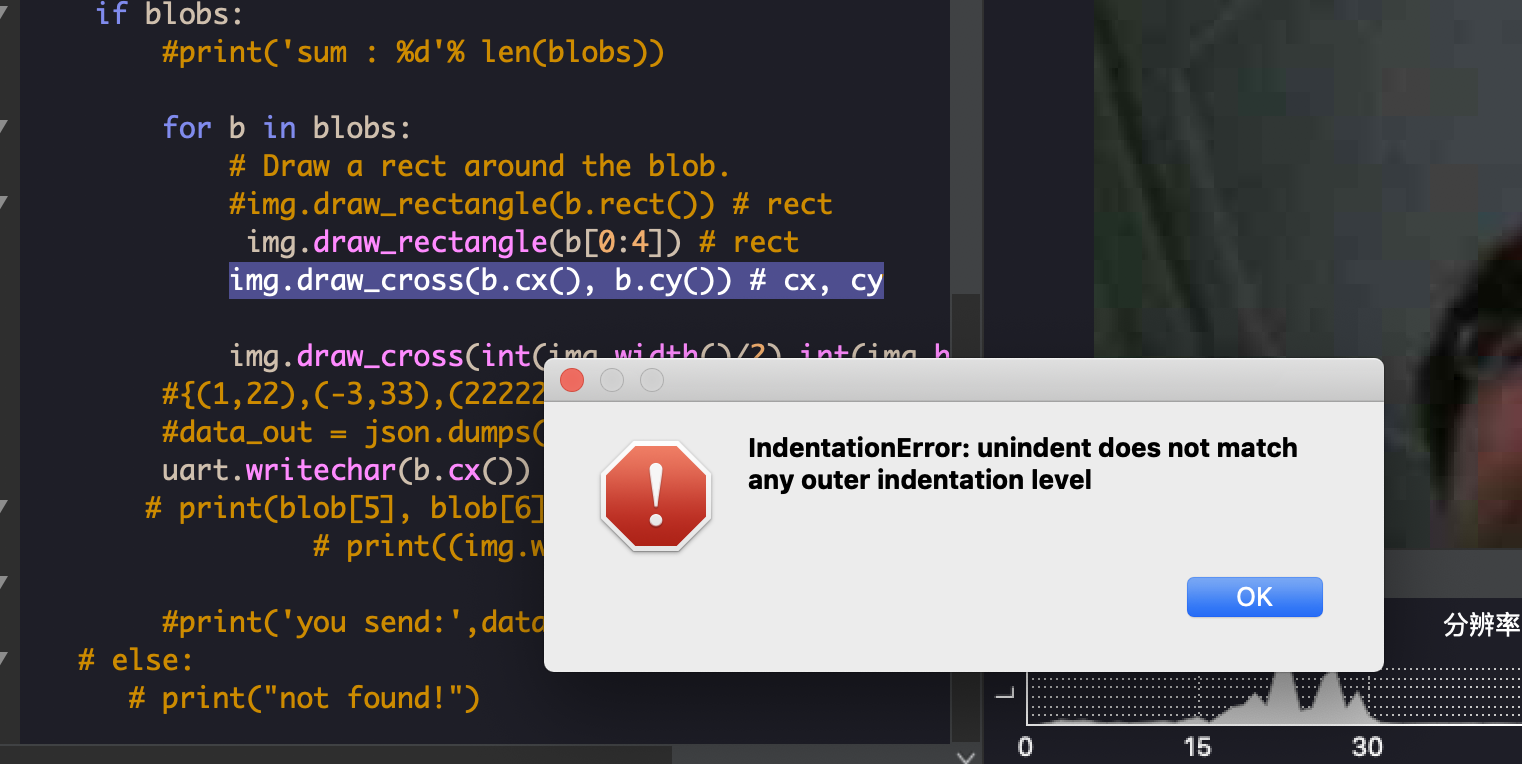
很明显 缩进有问题。