系统迁移中,暂时无法访问,所有数据会迁移到新的网站。
OpenMV VSCode 扩展发布了,在插件市场直接搜索OpenMV就可以安装
如果有产品硬件故障问题,比如无法开机,论坛很难解决。可以直接找售后维修。
发帖子之前,请确认看过所有的视频教程,https://singtown.com/learn/ 和所有的上手教程http://book.openmv.cc/
每一个新的提问,单独发一个新帖子
帖子需要目的,你要做什么?
如果涉及代码,需要报错提示与全部代码文本,请注意不要贴代码图片
必看:玩转星瞳论坛了解一下图片上传,代码格式等问题。
串口接收数据,程序只执行一下子,openmv直接卡死,报错
-
import sensor, image, time from pyb import UART sensor.reset() # Reset and initialize the sensor. sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE) sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240) sensor.skip_frames(time = 2000) # Wait for settings take effect. clock = time.clock() # Create a clock object to track the FPS. uart = UART(3, 115200) a=0 while(True): clock.tick() # Update the FPS clock. img = sensor.snapshot() # Take a picture and return the image. print(clock.fps()) # Note: OpenMV Cam runs about half as fast when connected # to the IDE. The FPS should increase once disconnected. #code = 'A' #print(code) #uart.write(code) if uart.any(): recieve = uart.readline().decode().strip() print(recieve) if recieve == 'L': print("We win.") a=a+1 print(a) print("\n") else: print("No FOUND")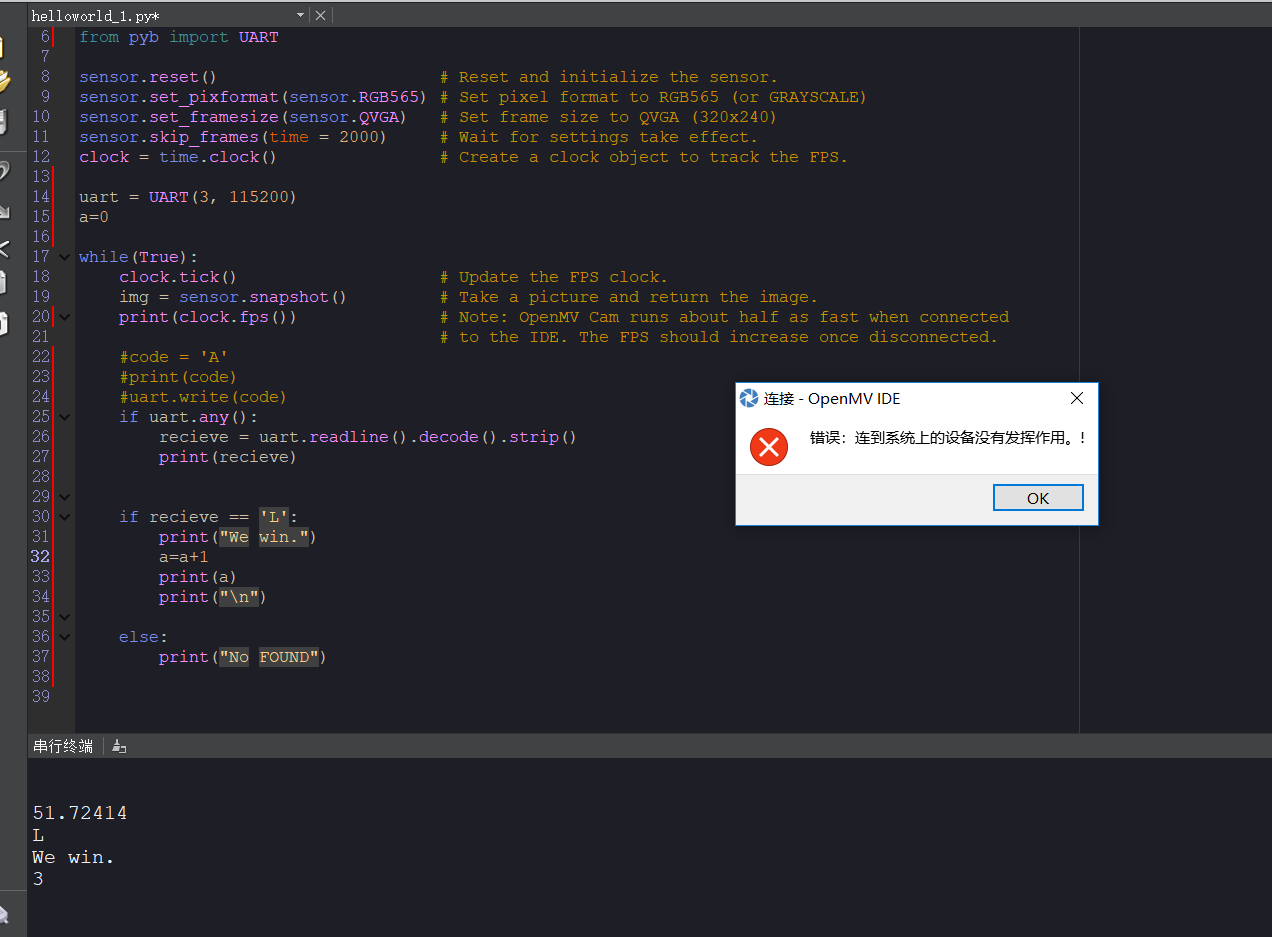
-
传递过来的数据是‘L\n’
-
你的代码不对,if recieve == 'L':应该在if uart.any():里面。
import sensor, image, time from pyb import UART sensor.reset() # Reset and initialize the sensor. sensor.set_pixformat(sensor.GRAYSCALE) # Set pixel format to RGB565 (or GRAYSCALE) sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240) sensor.skip_frames(time = 2000) # Wait for settings take effect. clock = time.clock() # Create a clock object to track the FPS. uart = UART(3, 115200) a=0 while(True): clock.tick() # Update the FPS clock. img = sensor.snapshot() # Take a picture and return the image. print(clock.fps()) # Note: OpenMV Cam runs about half as fast when connected # to the IDE. The FPS should increase once disconnected. #code = 'A' #print(code) #uart.write(code) if uart.any(): recieve = uart.readline().decode().strip() print(recieve) if recieve == 'L': print("We win.") a=a+1 print(a) print("\n") else: print("No FOUND")
-
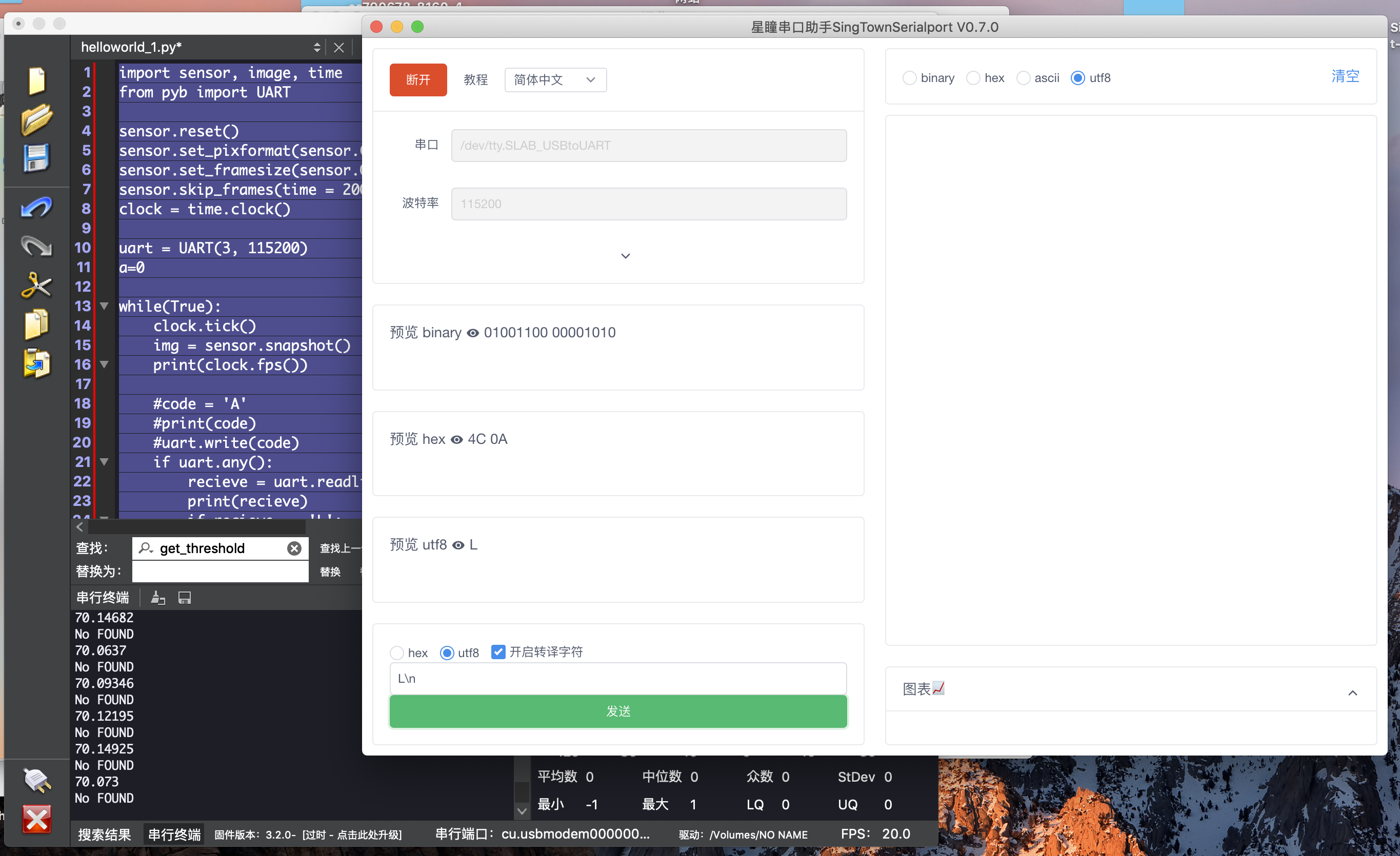
我用串口助手发送数据,没发现问题。