apriltag跟随小车无法实现
-
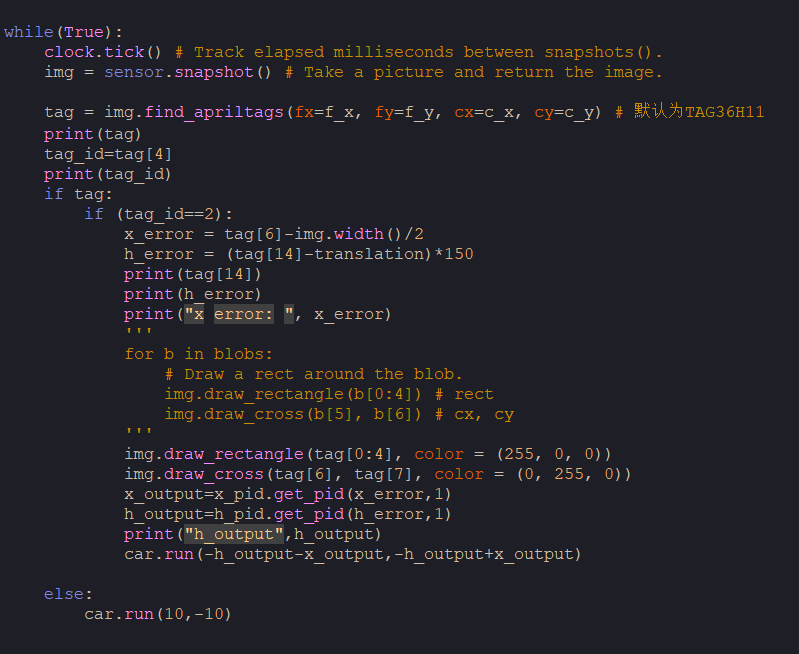
程序错误代码为list index out of range
但是输出的tag列表没有超范围,求助
-
请把报错提示和代码一起截图
-
一个提问,一个帖子,标题为问题的介绍
请贴出具体的代码,与报错提示。
代码一定要让别人可以运行的文本,不要贴图片
-
Blob Detection Example
This example shows off how to use the find_blobs function to find color
blobs in the image. This example in particular looks for dark green objects.
import sensor, image, time
import car
from pid import PIDYou may need to tweak the above settings for tracking green things...
Select an area in the Framebuffer to copy the color settings.
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QQVGA) # we run out of memory if the resolution is much bigger...
sensor.skip_frames(30)
sensor.set_auto_gain(False) # must turn this off to prevent image washout...
sensor.set_auto_whitebal(False) # turn this off.
clock = time.clock() # Tracks FPS.For color tracking to work really well you should ideally be in a very, very,
very, controlled enviroment where the lighting is constant...
f_x = (2.8 / 3.984) * 160 # 默认值
f_y = (2.8 / 2.952) * 120 # 默认值
c_x = 160 * 0.5 # 默认值(image.w * 0.5)
c_y = 120 * 0.5 # 默认值(image.h * 0.5)translation=-6
x_pid = PID(p=0.005, i=1, imax=100)
h_pid = PID(p=0.005, i=0.1, imax=50)def find_tag(tags):
size=0
for apriltag in tags:
print(apriltag)
if apriltag[2]*apriltag[3] > size:
tag=apriltag
size = apriltag[2]*apriltag[3]
return tagwhile(True):
clock.tick() # Track elapsed milliseconds between snapshots().
img = sensor.snapshot() # Take a picture and return the image.tags = img.find_apriltags(fx=f_x, fy=f_y, cx=c_x, cy=c_y) # 默认为TAG36H11 #print(tags) if tags: tag = find_tag(tags) #print(tag) tag_id=tag[4] if (tag_id==2): print(tag[6]) x_error = tag[6]-img.width()/2 h_error = (tag[14]-translation)*200 #print(tag[14]) #print(h_error) #print("x error: ", x_error) ''' for b in blobs: # Draw a rect around the blob. img.draw_rectangle(b[0:4]) # rect img.draw_cross(b[5], b[6]) # cx, cy ''' img.draw_rectangle(tag[0:4], color = (255, 0, 0)) img.draw_cross(tag[6], tag[7], color = (0, 255, 0)) x_output=x_pid.get_pid(x_error,1) h_output=h_pid.get_pid(h_error,1) print("x_output",x_output) print("h_output",h_output) car.run(-h_output-x_output,-h_output+x_output) else: car.run(0,0)
-
请截报错的图。因为报错是提示你具体哪行错的。
-
这个算是基本能实现跟踪apriltag标签了,但是我想要的是通过云台来搜索标签在来控制小车的运动,请问这个可以实现吗
-
可以实现,但云台和小车不能直接都接到同一个OpenMV上,引脚冲突。你要考虑自己加主控串口通信。