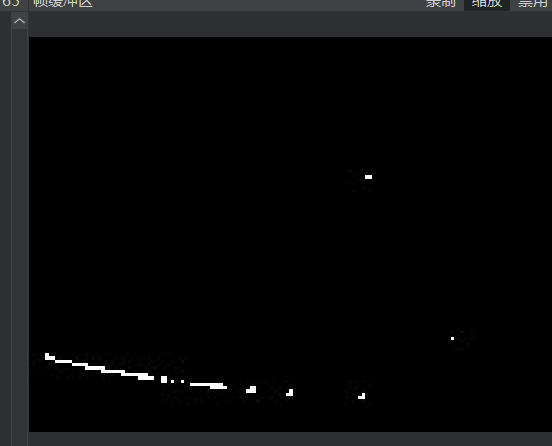
两个摄像头型号都是H7plus,使用官方例程里面的边缘检测,有一个有问题,但是运行其他程序却基本没问题,这是什么原因
-
# 边缘检测例子: # # 这个程序示范了在图像上使用morph函数来进行边缘检测。 # 然后在进行阈值和滤波 import sensor, image, time #设置核函数滤波,核内每个数值值域为[-128,127],核需为列表或元组 kernel_size = 1 # kernel width = (size*2)+1, kernel height = (size*2)+1 kernel = [-1, -1, -1,\ -1, +8, -1,\ -1, -1, -1] # 这个一个高通滤波器。见这里有更多的kernel # http://www.fmwconcepts.com/imagemagick/digital_image_filtering.pdf thresholds = [(100, 255)] # grayscale thresholds设置阈值 sensor.reset() # 初始化 sensor. #初始化摄像头 sensor.set_pixformat(sensor.GRAYSCALE) # or sensor.RGB565 #设置图像色彩格式,有RGB565色彩图和GRAYSCALE灰度图两种 sensor.set_framesize(sensor.QQVGA) # or sensor.QVGA (or others) #设置图像像素大小 sensor.skip_frames(10) # 让新的设置生效 clock = time.clock() # 跟踪FPS帧率 # 在OV7725 sensor上, 边缘检测可以通过设置sharpness/edge寄存器来增强。 # 注意:这将在以后作为一个函数实现 if (sensor.get_id() == sensor.OV7725): sensor.__write_reg(0xAC, 0xDF) sensor.__write_reg(0x8F, 0xFF) while(True): clock.tick() # 追踪两个snapshots()之间经过的毫秒数. img = sensor.snapshot() # 拍一张照片,返回图像 img.morph(kernel_size, kernel) #morph(size, kernel, mul=Auto, add=0),morph变换,mul根据图像对比度 #进行调整,mul使图像每个像素乘mul;add根据明暗度调整,使得每个像素值加上add值。 #如果不设置则不对morph变换后的图像进行处理。 img.binary(thresholds) #利用binary函数对图像进行分割 # Erode pixels with less than 2 neighbors using a 3x3 image kernel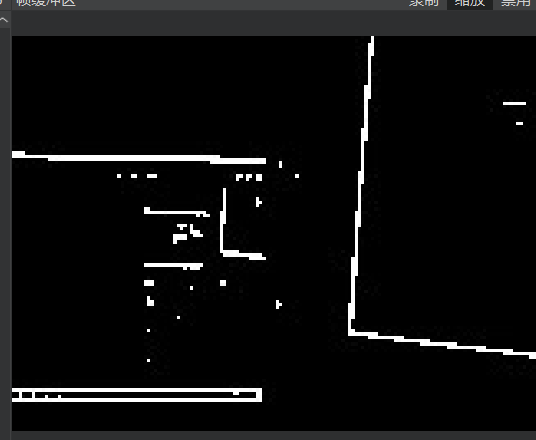 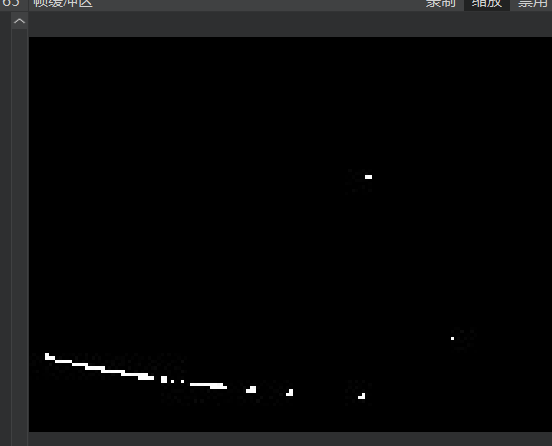 # 腐蚀像素小于2邻居使用3x3图像内核 img.erode(1, threshold = 2) #侵蚀函数erode(size, threshold=Auto),去除边缘相邻处多余的点。threshold #用来设置去除相邻点的个数,threshold数值越大,被侵蚀掉的边缘点越多,边缘旁边 #白色杂点少;数值越小,被侵蚀掉的边缘点越少,边缘旁边的白色杂点越多。 print(clock.fps()) # 注意: 当连接电脑后,OpenMV会变成一半的速度。当不连接电脑,帧率会增加。
-

-
“有一个有问题”,具体是什么问题?
-
@kidswong999 有一个识别效果不好,照片在下面放着,两个的对比
-
固件版本分别是多少?
-
@kidswong999 固件版本是4.5.5
-
这个我没办法远程解决,可以联系售后寄回检查。
-
@kidswong999 好的,麻烦了,谢谢!!