系统迁移中,暂时无法访问,所有数据会迁移到新的网站。
OpenMV VSCode 扩展发布了,在插件市场直接搜索OpenMV就可以安装
如果有产品硬件故障问题,比如无法开机,论坛很难解决。可以直接找售后维修。
发帖子之前,请确认看过所有的视频教程,https://singtown.com/learn/ 和所有的上手教程http://book.openmv.cc/
每一个新的提问,单独发一个新帖子
帖子需要目的,你要做什么?
如果涉及代码,需要报错提示与全部代码文本,请注意不要贴代码图片
必看:玩转星瞳论坛了解一下图片上传,代码格式等问题。
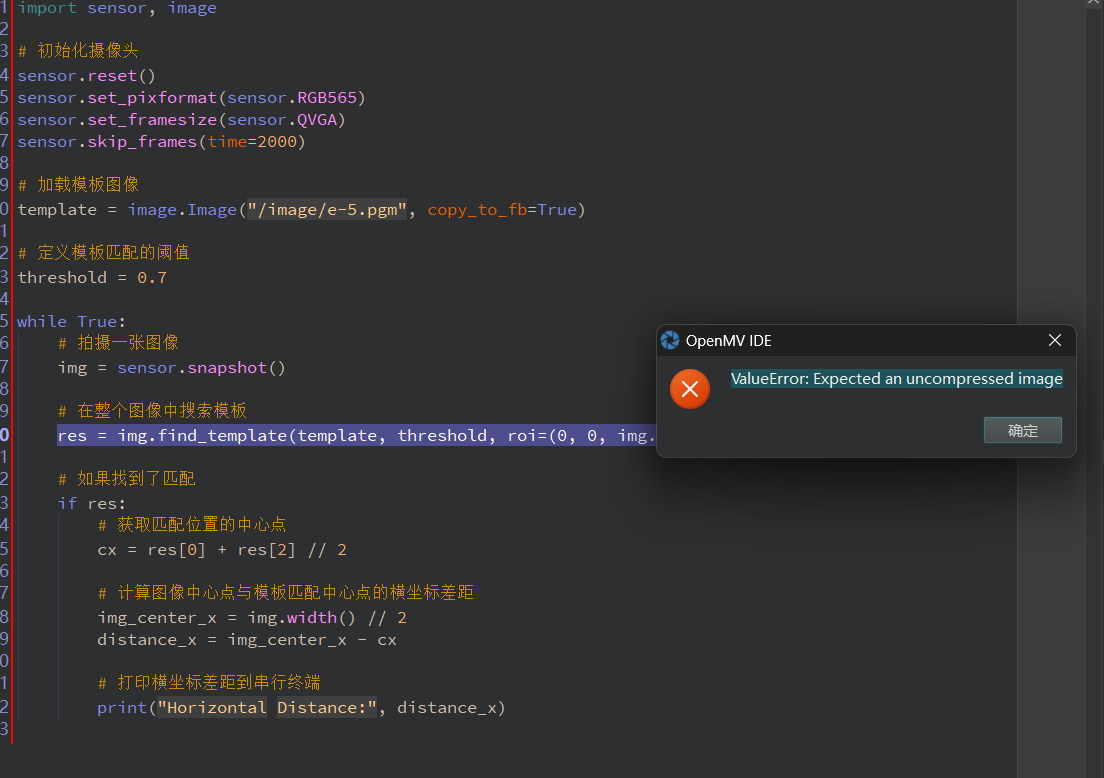
在线等大佬求助解答,为什么会这样?
-
dddddddd
-
1,发代码,需要报错提示与全部代码文本,请注意不要贴代码图片
2,发电脑上文件管理器的截图。
-
你好大佬,我的问题是这样的
我想问下为什么这里总是显示没有未压缩的图片,但是我截取的图片采用的就是openmv官网给的代码,openmv进行模板匹配的图片必须是pgm格式,但是模板截取不能直接生成pgm格式,要转换格式必须进行压缩,这不是自相矛盾吗
-
-
import sensor, image # 初始化摄像头 sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.skip_frames(time=2000) # 加载模板图像 template = image.Image("/image/e-5.pgm", copy_to_fb=True) # 定义模板匹配的阈值 threshold = 0.7 while True: # 拍摄一张图像 img = sensor.snapshot() # 在整个图像中搜索模板 res = img.find_template(template, threshold, roi=(0, 0, img.width(), img.height())) # 如果找到了匹配 if res: # 获取匹配位置的中心点 cx = res[0] + res[2] // 2 # 计算图像中心点与模板匹配中心点的横坐标差距 img_center_x = img.width() // 2 distance_x = img_center_x - cx # 打印横坐标差距到串行终端 print("Horizontal Distance:", distance_x)
-
# Template Matching Example - Normalized Cross Correlation (NCC) # # This example shows off how to use the NCC feature of your OpenMV Cam to match # image patches to parts of an image... expect for extremely controlled enviorments # NCC is not all to useful. # # WARNING: NCC supports needs to be reworked! As of right now this feature needs # a lot of work to be made into somethin useful. This script will reamin to show # that the functionality exists, but, in its current state is inadequate. import time, sensor, image from image import SEARCH_EX, SEARCH_DS #从imgae模块引入SEARCH_EX和SEARCH_DS。使用from import仅仅引入SEARCH_EX, #SEARCH_DS两个需要的部分,而不把image模块全部引入。 # Reset sensor sensor.reset() # Set sensor settings sensor.set_contrast(1) sensor.set_gainceiling(16) # Max resolution for template matching with SEARCH_EX is QQVGA sensor.set_framesize(sensor.QQVGA) # You can set windowing to reduce the search image. #sensor.set_windowing(((640-80)//2, (480-60)//2, 80, 60)) sensor.set_pixformat(sensor.GRAYSCALE) # Load template. # Template should be a small (eg. 32x32 pixels) grayscale image. template = image.Image("/image/e-5.pgm") #加载模板图片 clock = time.clock() # Run template matching while (True): clock.tick() img = sensor.snapshot() # find_template(template, threshold, [roi, step, search]) # ROI: The region of interest tuple (x, y, w, h). # Step: The loop step used (y+=step, x+=step) use a bigger step to make it faster. # Search is either image.SEARCH_EX for exhaustive search or image.SEARCH_DS for diamond search # # Note1: ROI has to be smaller than the image and bigger than the template. # Note2: In diamond search, step and ROI are both ignored. r = img.find_template(template, 0.60, step=4, search=SEARCH_EX) #, roi=(10, 0, 60, 60)) #find_template(template, threshold, [roi, step, search]),threshold中 #的0.7是相似度阈值,roi是进行匹配的区域(左上顶点为(10,0),长80宽60的矩形), #注意roi的大小要比模板图片大,比frambuffer小。 #把匹配到的图像标记出来 if r: img.draw_rectangle(r) print(clock.fps())这是模板匹配的代码
-
![0_1716554234285_NI0~~OZW8Q1T$VG]$I((FCL.png](正在上传 0%) @kidswong999 
-
-

-
你是怎么生成的pgm格式?你需要格式转换工具,而不是直接改后缀。
 !
!