系统迁移中,暂时无法访问,所有数据会迁移到新的网站。
OpenMV VSCode 扩展发布了,在插件市场直接搜索OpenMV就可以安装
如果有产品硬件故障问题,比如无法开机,论坛很难解决。可以直接找售后维修。
发帖子之前,请确认看过所有的视频教程,https://singtown.com/learn/ 和所有的上手教程http://book.openmv.cc/
每一个新的提问,单独发一个新帖子
帖子需要目的,你要做什么?
如果涉及代码,需要报错提示与全部代码文本,请注意不要贴代码图片
必看:玩转星瞳论坛了解一下图片上传,代码格式等问题。
现在是一识别到物体,这边就报错,应该是之前我把u盘main文件换成我的了,请问怎么解决?
-
import sensor, image, time ,pyb from pyb import LED from pyb import UART import struct import json red_led = LED(1) green_led = LED(2) thresholds = [(25, 95, 23, 92, 10, 79), # 一般情况下的红色阈值 (47, 99, -92, -18, 4, 84), # 一般情况下的绿色阈值(16, 40, -58, -18, 8, 50) (0, 80, -78, -20, -57, 4), # 一般情况下的蓝色阈值(26, 71, -27, 1, -59, -20)(7, 32, -31, 26, -82, -12) (0, 73, 94, 19, 1, 127)] #red_threshold = (12, 100, 127, 28, -128, 127) #thresholds=[ (47, 99, -92, -18, 4, 84)] #blue_threshold = (12, 100, 127, 28, -128, 127) #green_threshold = (12, 100, 127, 28, -128, 127) Left_Right_error=0 uart = UART(3, 256000) middle = 0 distance = 0 sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.skip_frames(10) sensor.set_auto_whitebal(False) clock = time.clock() def find_max(blobs): max_size=0 for blob in blobs: if blob[2]*blob[3] > max_size: max_blob=blob max_size = blob[2]*blob[3] return max_blob while(True): clock.tick() img = sensor.snapshot() blobs = img.find_blobs(thresholds) # blobs = img.find_blobs(thresholds, pixels_threshold=150, area_threshold=150, merge=True) if blobs: green_led.on() max_blob = find_max(blobs) middle_x = max_blob.cx() middle_y = max_blob.cy() Len=max_blob[2] width=max_blob[3] img.draw_rectangle(max_blob.rect()) img.draw_cross(max_blob.cx(), max_blob.cy()) Lm = (max_blob[2]+max_blob[3])/2 distance = int(2668/Lm) # print(distance) uart.writechar(0xf1) uart.writechar(middle_x>>8) uart.writechar(middle_x) uart.writechar(middle_y>>8) uart.writechar(middle_y) uart.writechar(Len>>8) uart.writechar(Len) uart.writechar(width>>8) uart.writechar(width) uart.writechar(0xf2) print(middle_x,middle_y,max_blob[2],max_blob[3]) else: green_led.off() for c in img.find_circles(threshold = 2000, x_margin = 10, y_margin = 10, r_margin = 10, r_min = 2, r_max = 100, r_step = 2): img.draw_circle(c.x(), c.y(), c.r(), color = (255, 0, 0)) print(c) 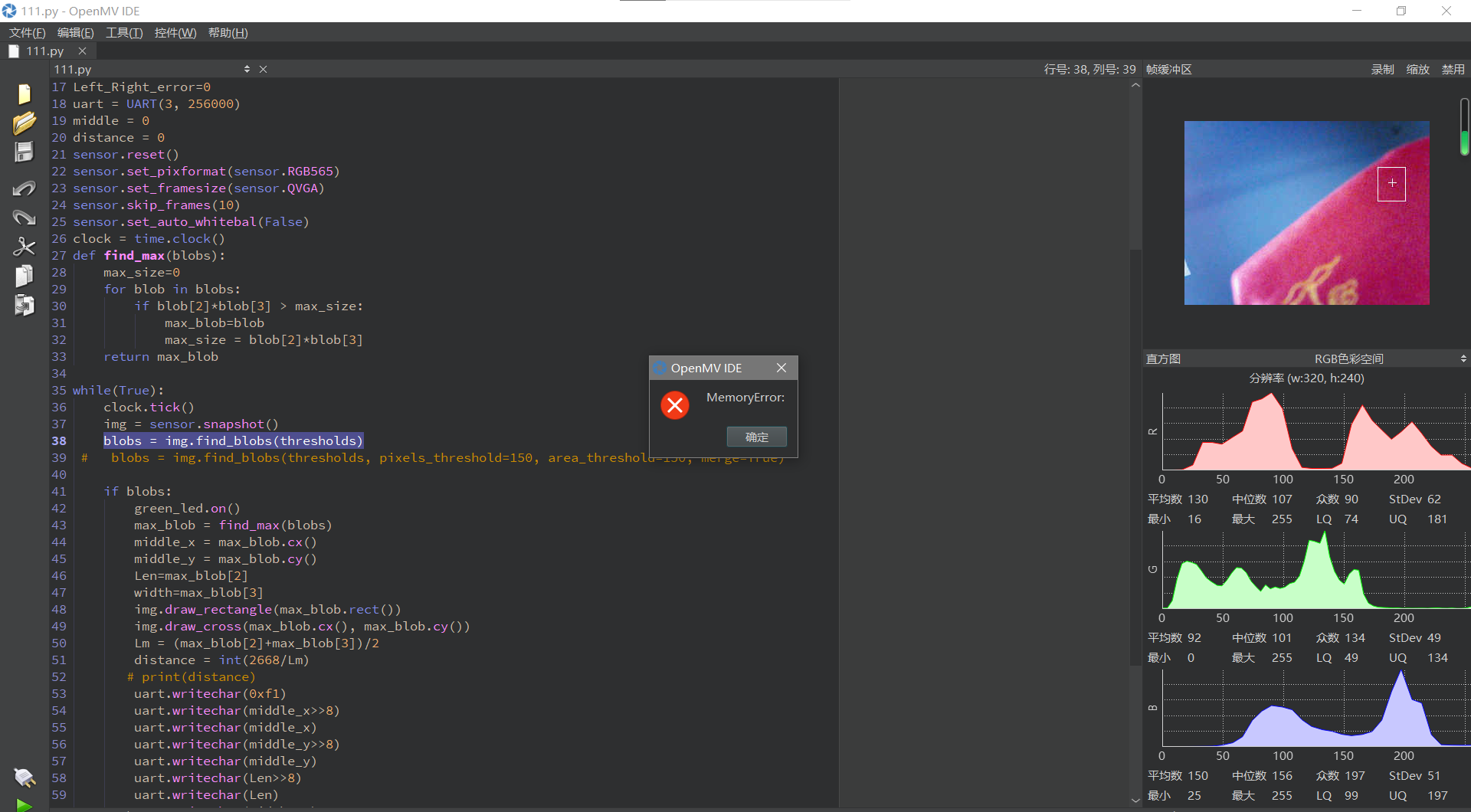
-
1,你的代码最后缩进有错误
2,find_circles很耗费ram,所以OpenMV4 H7上不能在QVGA上使用解决办法:
1,QVGA改为QQVGA
2,换OpenMV4 Plus