系统迁移中,暂时无法访问,所有数据会迁移到新的网站。
OpenMV VSCode 扩展发布了,在插件市场直接搜索OpenMV就可以安装
如果有产品硬件故障问题,比如无法开机,论坛很难解决。可以直接找售后维修。
发帖子之前,请确认看过所有的视频教程,https://singtown.com/learn/ 和所有的上手教程http://book.openmv.cc/
每一个新的提问,单独发一个新帖子
帖子需要目的,你要做什么?
如果涉及代码,需要报错提示与全部代码文本,请注意不要贴代码图片
必看:玩转星瞳论坛了解一下图片上传,代码格式等问题。
extra positional arguments given
-
# Find Rects Example # # 这个例子展示了如何使用april标签代码中的四元检测代码在图像中找到矩形。 四元检测算法以非常稳健的方式检测矩形,并且比基于Hough变换的方法好得多。 例如,即使镜头失真导致这些矩形看起来弯曲,它仍然可以检测到矩形。 圆角矩形是没有问题的! # (但是,这个代码也会检测小半径的圆)... import sensor, image, time from pyb import UART from machine import LED dark_exp=15000 sensor.reset() sensor.set_pixformat(sensor.RGB565) # 灰度更快(160x120 max on OpenMV-M7) #sensor.set_pixformat(sensor.GRAYSCALE) sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # 关闭自动自动增益 sensor.set_auto_whitebal(False,(0,0,0)) # 关闭白平衡 第二个参数代表颜色 sensor.set_brightness(1500) # 设置图像亮度 越大越亮 sensor.set_auto_exposure(False,10000)#设置曝光时间 #定义计算两点距离的函数 def euler_distance(x1,y1,x2,y2): return ((x1-x2)**2+(y1-y2)**2)**(1/2) clock = time.clock() uart = UART(3,115200)#串口通信,波特率为115200 thresholds_gray = [(70, 255)] # grayscale thresholds thresholds_rgb = [(20, 100, 20, 127, -128, 127), # generic_red_thresholds//3 (5, 91, -128, -45, -7, 127), # generic_green_thresholds//4 (0, 100, -96, 127, -128, -24)] # generic_blue_thresholds//6 threshold_black=[(0,25,-10,10,-10,10)] #暂时没用 threshold_test=(100, 42, -58, 127, -21, 40) #边缘检测卷积核还是锐化卷积核。。强调水平和垂直边缘。。的锐化 kernel_size = 1 # kernel width = (size*2)+1, kernel height = (size*2)+1 kernel = [-1, -1, -1,\ -1, +8, -1,\ -1, -1, -1] thresholds_gray = [(70, 255)] # grayscale thresholds recognize_rect_flag=0 recognize_red_pen_flag=0 #sensor.set_brightness(100) # 设置图像亮度 越大越亮 #sensor.set_auto_exposure(False,14000) recognize_green_pen_flag=0 #暂时没用 rect_point1_list=[] #识别多次,内部是坐标列表 rect_point2_list=[] rect_point3_list=[] rect_point4_list=[] avg_rect_point1=[0,0] avg_rect_point2=[0,0] avg_rect_point3=[0,0] avg_rect_point4=[0,0] recognize_rect_count=0 #识别计数 recognize_timeout_orign=10 recognize_timeout=10 #几帧没识别到转换阈值 while(True): clock.tick() img = sensor.snapshot()#.lens_corr(1.8) if (uart.any()): recv_data =(uart.read()) print(recv_data) if (recv_data==b'r'): recognize_rect_flag = 1 recognize_red_pen_flag=0 if(recv_data==b'q'): recognize_red_pen_flag=1 recognize_rect_flag=0 #sensor.set_brightness(100) # 设置图像亮度 越大越亮 #sensor.set_auto_exposure(False,1000) if(recv_data==b'p'):#恢复初始状态 sensor.set_auto_exposure(False,10000) recognize_rect_flag=0 recognize_red_pen_flag=0 recognize_green_pen_flag=0 #暂时没用 rect_point1_list=[] #识别多次,内部是坐标列表 rect_point2_list=[] rect_point3_list=[] rect_point4_list=[] avg_rect_point1=[0,0] avg_rect_point2=[0,0] avg_rect_point3=[0,0] avg_rect_point4=[0,0] recognize_rect_count=0 #识别计数 if recognize_rect_flag: #print("test") for r in img.find_rects(threshold = 5000): corners=r.corners() length1=euler_distance(corners[0][0],corners[0][1],corners[1][0],corners[1][1]) #左下 右下 底边 length2=euler_distance(corners[1][0],corners[1][1],corners[2][0],corners[2][1]) #右下 右上 右侧边 length3=euler_distance(corners[2][0],corners[2][1],corners[3][0],corners[3][1]) #右上 左上 顶边 length4=euler_distance(corners[3][0],corners[3][1],corners[0][0],corners[0][1]) #左上 左下 左侧边 long_edge=1 short_edge=1 #判断长短边 if length1>length2: long_edge=length1 short_edge=length2 else: long_edge=length2 short_edge=length1 strange_flag=0 #判断是不是奇形怪状 if(length1==0 or length2==0 or length3==0 or length4==0):#某一边为0 strange_flag=1 elif((length1/length3)>0.85 and (length1/length3)<1.15 and (length2/length4)>0.85 and (length2/length4)<1.15): strange_flag=0 #对边长度误差在0.15比例范围以内 else: strange_flag=1 # 最终滤波 if strange_flag==0 and long_edge>25 and short_edge>25 and long_edge/short_edge<1.6: #and x>20 and x<140 and y>15 and y<105 and w_h>0.4 and w_h<1.6 and height>20 and width>20 img.draw_rectangle(r.rect(),color=(255,0,0)) for p in r.corners(): img.draw_circle(p[0], p[1], 5, color = (0, 255, 0)) #img.draw_cross(p[0], p[1]) #img.save("./img{}.jpg".format(len(rect_point1_list)),quality=80) #开始存入列表 recognize_rect_count+=1 #计数 并将每次所得坐标加入列表 rect_point1_list.append(corners[0]) rect_point2_list.append(corners[1]) rect_point3_list.append(corners[2]) rect_point4_list.append(corners[3]) print (corners) if(recognize_rect_count>=5):#停止识别 五次 for i in range(recognize_rect_count): #求各个坐标的平均值 avg_rect_point1[0]+=rect_point1_list[i][0] avg_rect_point1[1]+=rect_point1_list[i][1] avg_rect_point2[0]+=rect_point2_list[i][0] avg_rect_point2[1]+=rect_point2_list[i][1] avg_rect_point3[0]+=rect_point3_list[i][0] avg_rect_point3[1]+=rect_point3_list[i][1] avg_rect_point4[0]+=rect_point4_list[i][0] avg_rect_point4[1]+=rect_point4_list[i][1] avg_rect_point1[0]=(avg_rect_point1[0]/recognize_rect_count) avg_rect_point1[1]=(avg_rect_point1[1]/recognize_rect_count) avg_rect_point2[0]=(avg_rect_point2[0]/recognize_rect_count) avg_rect_point2[1]=(avg_rect_point2[1]/recognize_rect_count) avg_rect_point3[0]=(avg_rect_point3[0]/recognize_rect_count) avg_rect_point3[1]=(avg_rect_point3[1]/recognize_rect_count) avg_rect_point4[0]=(avg_rect_point4[0]/recognize_rect_count) avg_rect_point4[1]=(avg_rect_point4[1]/recognize_rect_count) #矩形旋转一定角度会改变四个角点坐标的返回顺序,有顺时针和逆时针两种//找最大2个判断法 //左上是1号//顺时针排列 ############ newdata=[[0,0],[0,0],[0,0],[0,0]] data_dict={1:(avg_rect_point1[0],avg_rect_point1[1]),2:(avg_rect_point2[0],avg_rect_point2[1]),3:(avg_rect_point3[0],avg_rect_point3[1]),4:(avg_rect_point4[0],avg_rect_point4[1])} one_sort=sorted(data_dict.items(),key = lambda x: x[1][0]) #按x坐标大小排序,返回列表 #data_dict.items():以列表的形式返回可遍历的元组数组;lambda x:定义x的值为x[1][0] #偏左的两个点 first2=[] first2.append(one_sort[0]) first2.append(one_sort[1]) #偏右的两个点 second2=[]#=[] #?!? second2.append(one_sort[2]) second2.append(one_sort[3]) # 分别提取first2和second2中角点的索引和坐标,准备进行y坐标的排序 list_a = [first2[0][0]]+[first2[1][0]] list_b = [first2[0][1]]+[first2[1][1]] first2_dict = dict(zip(list_a, list_b)) # 将坐标打包成元组,再返回元组的列表,再将列表转成字典 list_a = [second2[0][0]]+[second2[1][0]] list_b = [second2[0][1]]+[second2[1][1]] second2_dict = dict(zip(list_a, list_b)) first2_sort=sorted(first2_dict.items(),key = lambda x: x[1][1],reverse=True) #y坐标 逆序排序 second2_sort=sorted(second2_dict.items(),key = lambda x: x[1][1]) #顺序排序 all_sort=first2_sort+second2_sort #无论任何角度摆放矩形都顺时针发送角点坐标 newdata[0][0]=all_sort[0][1][0] newdata[0][1]=all_sort[0][1][1] newdata[1][0]=all_sort[1][1][0] newdata[1][1]=all_sort[1][1][1] newdata[2][0]=all_sort[2][1][0] newdata[2][1]=all_sort[2][1][1] newdata[3][0]=all_sort[3][1][0] newdata[3][1]=all_sort[3][1][1] ######## avg_rect_point1[0]=newdata[0][0] avg_rect_point1[1]=newdata[0][1] avg_rect_point2[0]=newdata[1][0] avg_rect_point2[1]=newdata[1][1] avg_rect_point3[0]=newdata[2][0] avg_rect_point3[1]=newdata[2][1] avg_rect_point4[0]=newdata[3][0] avg_rect_point4[1]=newdata[3][1] print("均值后点1:",avg_rect_point1[0],",",avg_rect_point1[1],"点2:",avg_rect_point2[0],",",avg_rect_point2[1],"点3:",avg_rect_point3[0],",",avg_rect_point3[1],"点4:",avg_rect_point4[0],",",avg_rect_point4[1]) #看看能不能用 #? if(avg_rect_point1[1]>=89): avg_rect_point1[1]-=1.5 if(avg_rect_point2[1]>=89): avg_rect_point2[1]-=1.5 if(avg_rect_point3[1]>=89): avg_rect_point3[1]-=1.5 if(avg_rect_point4[1]>=89): avg_rect_point4[1]-=1.5 use_dev=1 if(use_dev): #由于都是外框,所以设置往里偏像素 dev_k=0.03 #偏移系数,总的像素差乘它 is_reverse_xy=0 #xy偏移计算方向相反 is_use_single=0 #只是正常加一个固定数 #分别计算对角点x、y坐标之差 delta1_x=avg_rect_point3[0]-avg_rect_point1[0] delta1_y=avg_rect_point3[1]-avg_rect_point1[1] delta2_x=avg_rect_point4[0]-avg_rect_point2[0] delta2_y=avg_rect_point4[1]-avg_rect_point2[1] ############################################################ #以下代码不起作用(bug、? if is_reverse_xy:#真 x 和 y 的偏移方向相反 delta1_x=(round)(delta1_x*abs(delta1_y)/abs(delta1_x)) delta1_y=(round)(delta1_y*abs(delta1_x)/abs(delta1_y)) delta2_x=(round)(delta2_x*abs(delta2_y)/abs(delta2_x)) delta2_y=(round)(delta2_y*abs(delta2_x)/abs(delta2_y)) if is_use_single: dev_k=1#? if delta1_x>0 : delta1_x=2 else: delta1_x=-2 if delta1_y>0 : delta1_y=2 else: delta1_y=-2 if delta2_x>0 : delta2_x=2 else: delta2_x=-2 if delta2_y>0 : delta2_y=2 else: delta2_y=-2 ############################################################# avg_rect_point1[0]+=dev_k*delta1_x avg_rect_point1[1]+=dev_k*delta1_y avg_rect_point3[0]-=dev_k*delta1_x avg_rect_point3[1]-=dev_k*delta1_y avg_rect_point2[0]+=dev_k*delta2_x #- avg_rect_point2[1]+=dev_k*delta2_y avg_rect_point4[0]-=dev_k*delta2_x #+仅某一情况 avg_rect_point4[1]-=dev_k*delta2_y #############################################################3 avg_rect_point1[0]=(round)(avg_rect_point1[0]) avg_rect_point1[1]=(round)(avg_rect_point1[1]) avg_rect_point2[0]=(round)(avg_rect_point2[0]) avg_rect_point2[1]=(round)(avg_rect_point2[1]) avg_rect_point3[0]=(round)(avg_rect_point3[0]) avg_rect_point3[1]=(round)(avg_rect_point3[1]) avg_rect_point4[0]=(round)(avg_rect_point4[0]) avg_rect_point4[1]=(round)(avg_rect_point4[1]) print("加偏移后点1:",avg_rect_point1[0],",",avg_rect_point1[1],"点2:",avg_rect_point2[0],",",avg_rect_point2[1],"点3:",avg_rect_point3[0],",",avg_rect_point3[1],"点4:",avg_rect_point4[0],",",avg_rect_point4[1]) img.draw_cross(avg_rect_point1[0], avg_rect_point1[1]) img.draw_cross(avg_rect_point2[0], avg_rect_point2[1]) img.draw_cross(avg_rect_point3[0], avg_rect_point3[1]) img.draw_cross(avg_rect_point4[0], avg_rect_point4[1]) img.save("./img{}.jpg".format(len(rect_point1_list)),quality=80)#保存图像 uart.write(bytearray([0xA5])) uart.write(bytearray([avg_rect_point1[0]])) uart.write(bytearray([avg_rect_point1[1]])) uart.write(bytearray([avg_rect_point2[0]])) uart.write(bytearray([avg_rect_point2[1]])) uart.write(bytearray([avg_rect_point3[0]])) uart.write(bytearray([avg_rect_point3[1]])) uart.write(bytearray([avg_rect_point4[0]])) uart.write(bytearray([avg_rect_point4[1]])) led.on() time.sleep_ms(500) led.off() ##直接转换成暗色 #sensor.set_brightness(1000) # 设置图像亮度 越大越亮 sensor.set_auto_exposure(False,dark_exp) #置回标志位 recognize_rect_flag=0 rect_point1_list=[] rect_point2_list=[] rect_point3_list=[] rect_point4_list=[] avg_rect_point1=[0,0] avg_rect_point2=[0,0] avg_rect_point3=[0,0] avg_rect_point4=[0,0] recognize_rect_count=0 break if recognize_red_pen_flag: max_area=0 max_index=0 get_blob=0 blobs = img.find_blobs([thresholds_rgb[0]],pixels_threshold=1, area_threshold=1, merge=True) # for i in range(len(blobs)): get_blob=1 #### #recognize_timeout=recognize_timeout_orign ### if blobs[i].area()>max_area: max_area=blobs[i].area() max_index=i if get_blob: r=blobs[max_index] img.draw_rectangle(r.rect()) img.draw_cross(r.cx(), r.cy()) #img.draw_keypoints([(r.cx(), r.cy(), int(math.degrees(r.rotation())))], size=20) #print(r.cx(), r.cy()) uart.write(bytearray([0xAA])) uart.write(bytearray([r.cx()])) uart.write(bytearray([r.cy()])) ##########超时识别绿色 #if(recognize_timeout==0): #print("timeout") #max_area=0 #max_index=0 #get_blob=0 #blobs = img.find_blobs([thresholds_rgb[0],thresholds_rgb[1]],pixels_threshold=1, area_threshold=1, merge=True) # #for i in range(len(blobs)): #get_blob=1 #if blobs[i].area()>max_area: #max_area=blobs[i].area() #max_index=i #if get_blob: #r=blobs[max_index] #img.draw_rectangle(r.rect()) #img.draw_cross(r.cx(), r.cy()) ##img.draw_keypoints([(r.cx(), r.cy(), int(math.degrees(r.rotation())))], size=20) ##print(r.cx(), r.cy()) #uart.write(bytearray([0xAA])) #uart.write(bytearray([r.cx()])) #uart.write(bytearray([r.cy()])) #if(get_blob==0 and recognize_timeout>0): #recognize_timeout-=1 #print(clock.fps())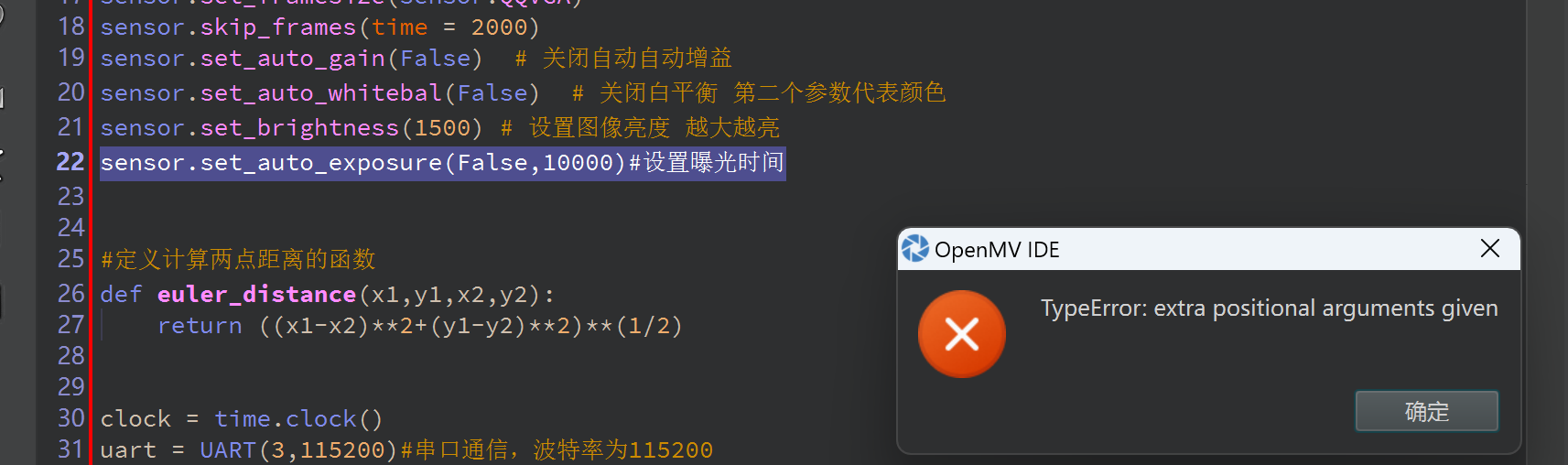
找了很多地方设置曝光时间都是这么写的,为什么报错了
-
参数要加exposure_us=
参考:
https://book.openmv.cc/example/21-Sensor-Control/sensor-exposure-control.html