系统迁移中,暂时无法访问,所有数据会迁移到新的网站。
OpenMV VSCode 扩展发布了,在插件市场直接搜索OpenMV就可以安装
如果有产品硬件故障问题,比如无法开机,论坛很难解决。可以直接找售后维修。
发帖子之前,请确认看过所有的视频教程,https://singtown.com/learn/ 和所有的上手教程http://book.openmv.cc/
每一个新的提问,单独发一个新帖子
帖子需要目的,你要做什么?
如果涉及代码,需要报错提示与全部代码文本,请注意不要贴代码图片
必看:玩转星瞳论坛了解一下图片上传,代码格式等问题。
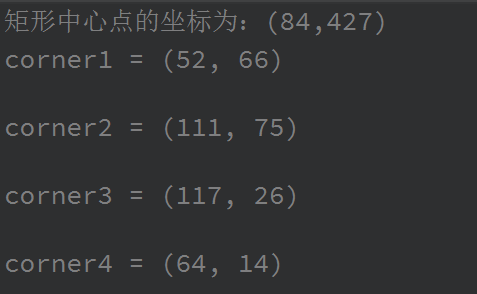
矩形识别中心十字线无法准确识别甚至识别不出来,另外校正畸变好像会降低画质,有什么办法吗
-
# Find Rects Example # # 这个例子展示了如何使用april标签代码中的四元检测代码在图像中找到矩形。 四元检测算法以非常稳健的方式检测矩形,并且比基于Hough变换的方法好得多。 例如,即使镜头失真导致这些矩形看起来弯曲,它仍然可以检测到矩形。 圆角矩形是没有问题的! # (但是,这个代码也会检测小半径的圆)... import sensor, image, time sensor.reset() sensor.set_pixformat(sensor.RGB565) # 灰度更快(160x120 max on OpenMV-M7) sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) clock = time.clock() size_threshold = 10000#物体和摄像头的距离(大小)正比 def find_max(blobs): max_size=0 for blob in blobs: if blob[2]*blob[3] > max_size: max_blob=blob max_size = blob[2]*blob[3] return max_blob while(True): clock.tick() img = sensor.snapshot() # 下面的`threshold`应设置为足够高的值,以滤除在图像中检测到的具有 # 低边缘幅度的噪声矩形。最适用与背景形成鲜明对比的矩形。 #img.lens_corr(1.8) blobs = img.find_rects(threshold = 20000) if blobs: max_blob = find_max(blobs) img.draw_rectangle(max_blob.rect(), color = (255, 0, 0)) i=0 img.draw_cross(int(max_blob[0]+max_blob[2]/2), int(max_blob[1]*max_blob[3]/2)) # cx, cy print(f"矩形中心点的坐标为:({int(max_blob[0]+max_blob[2]/2)},{int(max_blob[1]*max_blob[3]/2)})") for p in max_blob.corners(): img.draw_circle(p[0], p[1], 5, color = (0, 255, 0)) i=i+1 print(f"corner{i} = ({p[0]}, {p[1]})\n") print(max_blob) print("FPS %f" % clock.fps())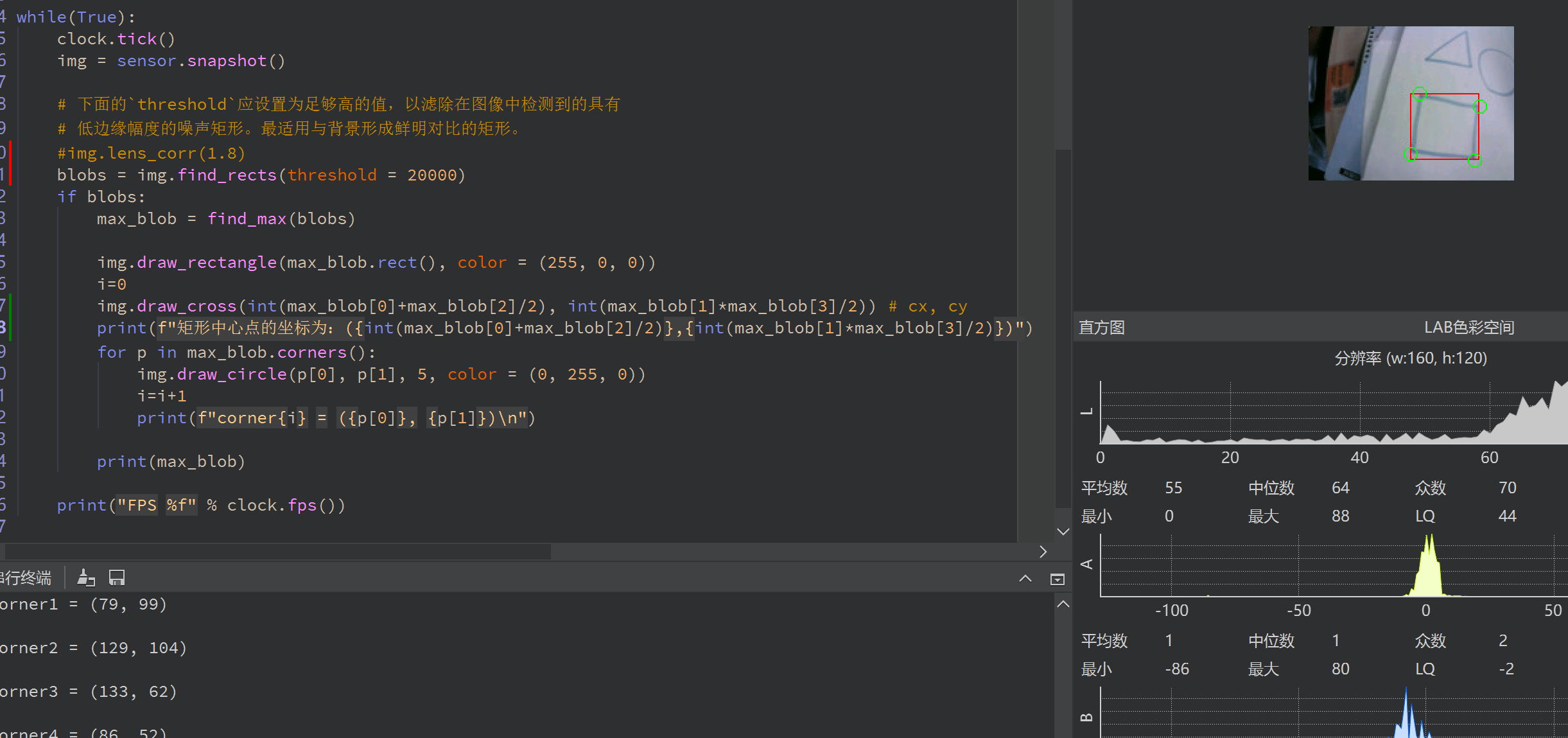
-
什么叫做识别中心十字线?
-
就是像色块识别那样,用矩形框出来,中间画的那个十字线
-
因为你把加号写成乘号了。
img.draw_cross(int(max_blob[0]+max_blob[2]/2), int(max_blob[1]*max_blob[3]/2))