系统迁移中,暂时无法访问,所有数据会迁移到新的网站。
OpenMV VSCode 扩展发布了,在插件市场直接搜索OpenMV就可以安装
如果有产品硬件故障问题,比如无法开机,论坛很难解决。可以直接找售后维修。
发帖子之前,请确认看过所有的视频教程,https://singtown.com/learn/ 和所有的上手教程http://book.openmv.cc/
每一个新的提问,单独发一个新帖子
帖子需要目的,你要做什么?
如果涉及代码,需要报错提示与全部代码文本,请注意不要贴代码图片
必看:玩转星瞳论坛了解一下图片上传,代码格式等问题。
打印出来的(x,y,w,h)中的w,h的被测物体宽度和高度像素点的大小吗?是的话怎样转换成实际物体大小?
-
寻找最大的矩形
沿矩形边框绘制线条
import sensor, image, time
相机初始化
sensor.reset()
sensor.set_pixformat(sensor.GRAYSCALE) # 设置图像格式为灰度
sensor.set_framesize(sensor.QQQVGA) # 设置图像大小
sensor.skip_frames(time=2000) # 等待设置生效
clock = time.clock() # 用于跟踪帧率while(True):
clock.tick()
img = sensor.snapshot().lens_corr(1.8)# 使用find_rects()方法寻找图像中的矩形 rects = img.find_rects(threshold = 10000) # 初始化变量来存储最大矩形的信息 max_area = 0 max_rect = None # 遍历所有找到的矩形,找出面积最大的矩形 for rect in rects: # 计算当前矩形的面积 area = rect.w() * rect.h() # 如果当前矩形的面积大于之前记录的最大面积,则更新最大矩形和最大面积 if area > max_area: max_area = area max_rect = rect # 如果找到了最大的矩形,则绘制它的边框 if max_rect: corners = max_rect.corners() # 获取最大矩形的四个角点 # 绘制最大矩形的四条边 for i in range(len(corners)): start_point = corners[i] end_point = corners[(i+1) % 4] img.draw_line(start_point[0], start_point[1], end_point[0], end_point[1], color = 255) print(corners)
-
-
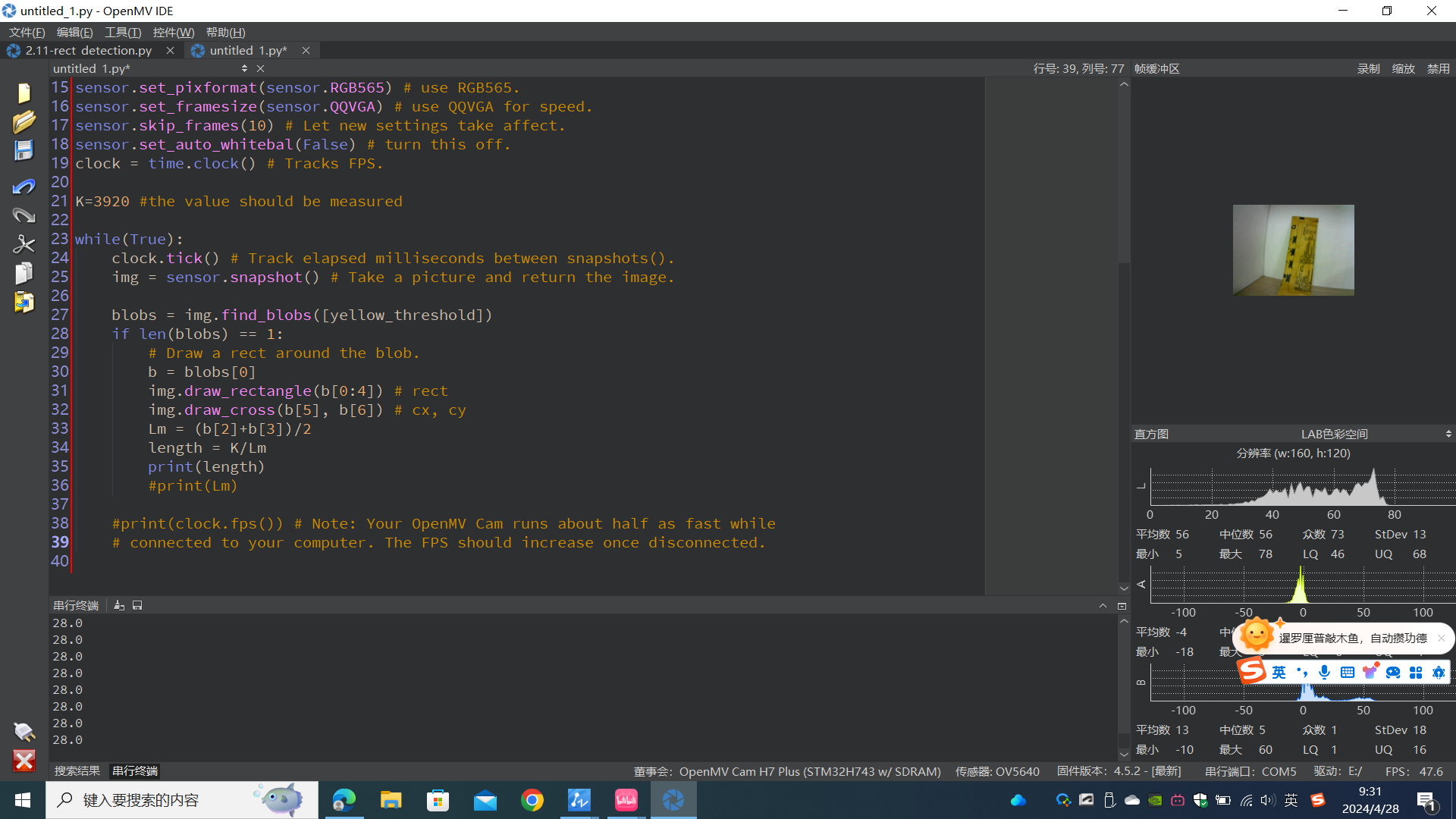
使用这个例程之后,移动物体与摄像头之间的距离,串口返回的数值不变的,这是为什么?
# Measure the distance # # This example shows off how to measure the distance through the size in imgage # This example in particular looks for yellow pingpong ball. import sensor, image, time # For color tracking to work really well you should ideally be in a very, very, # very, controlled enviroment where the lighting is constant... yellow_threshold = (33, 96, -34, 42, -13, 28) # You may need to tweak the above settings for tracking green things... # Select an area in the Framebuffer to copy the color settings. sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.RGB565) # use RGB565. sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed. sensor.skip_frames(10) # Let new settings take affect. sensor.set_auto_whitebal(False) # turn this off. clock = time.clock() # Tracks FPS. K=3920 #the value should be measured while(True): clock.tick() # Track elapsed milliseconds between snapshots(). img = sensor.snapshot() # Take a picture and return the image. blobs = img.find_blobs([yellow_threshold]) if len(blobs) == 1: # Draw a rect around the blob. b = blobs[0] img.draw_rectangle(b[0:4]) # rect img.draw_cross(b[5], b[6]) # cx, cy Lm = (b[2]+b[3])/2 length = K/Lm print(length) #print(Lm) #print(clock.fps()) # Note: Your OpenMV Cam runs about half as fast while # connected to your computer. The FPS should increase once disconnected.请在这里粘贴代码
-
而且使用上面的例程,摄像头捕捉到的是整个显示框,不是物体大小的size