系统迁移中,暂时无法访问,所有数据会迁移到新的网站。
OpenMV VSCode 扩展发布了,在插件市场直接搜索OpenMV就可以安装
如果有产品硬件故障问题,比如无法开机,论坛很难解决。可以直接找售后维修。
发帖子之前,请确认看过所有的视频教程,https://singtown.com/learn/ 和所有的上手教程http://book.openmv.cc/
每一个新的提问,单独发一个新帖子
帖子需要目的,你要做什么?
如果涉及代码,需要报错提示与全部代码文本,请注意不要贴代码图片
必看:玩转星瞳论坛了解一下图片上传,代码格式等问题。
IDE升级到固件4.5.1后,无法在LCD显示屏上面绘制文字,硬件是官方店铺买的OpenMv 4 Puls和LCD
-
# Blob Detection Example # # This example shows off how to use the find_blobs function to find color # blobs in the image. This example in particular looks for dark green objects. import sensor, image, time #导入模块 from pid import PID #导入PID控制模块 from pyb import Pin, Timer #导入引脚和定时器 from pyb import UART import display uart = UART(3, 115200) lcd = display.SPIDisplay() # Initialize the lcd screen. sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.RGB565) # use RGB565. sensor.set_framesize(sensor.QQVGA2) # use QQVGA for speed. sensor.skip_frames(10) # Let new settings take affect. sensor.set_auto_whitebal(False) # turn this off. sensor.set_auto_gain(False) # turn this off. #################阈值定义################################ fenbian_thresholds = [ (0, 100, 18, 127, 10, 127),#000-红 (0, 46, -128, -13, 6, 127) ,#001-绿 (0, 39, -128, 127, -128, -10) ]#020-蓝 yidong_thresholds = [ (44, 100, 15, 127, -9, 127),#000-红 (64, 100, -16, 3, 0, 127) ,#001-绿 (65, 100, 6, 127, -128, -18) ]#020-紫 ####################################################### #########电机控制函数############################################## def run(left_speed, right_speed): if inverse_left==True: #判断左轮是否需要反转 left_speed=(-left_speed) if inverse_right==True: #判断右轮是否需要反转 right_speed=(-right_speed) #设置通道PWM,应改为串口发送 l_speed="#006P"+str(int(abs(left_speed)))+"T1000!" uart.write(l_speed) r_speed="#007P"+str(int(abs(right_speed)))+"T1000!" uart.write(r_speed) #########寻找最大色块函数########################################### ####返回最大色块max_blob的blob参数###### def find_max(blobs): max_size=0 for blob in blobs: if blob[2]*blob[3] > max_size: max_blob=blob max_size = blob[2]*blob[3] return max_blob ########变量定义################################################### fenbian_mode=0 #方块 分辨模式 yidong_mode=000 #移动 分辨区域模式 inverse_left=False #将其更改为True以反转左轮 inverse_right=False #将其更改为True以反转右轮 size_threshold = 2000 x_pid = PID(p=0.5, i=1, imax=100) h_pid = PID(p=0.05, i=0.1, imax=50) yidong_finish_flag=0 ################################################################ clock = time.clock() # Tracks FPS. #############主循环############################################### while(True): clock.tick() # Track elapsed milliseconds between snapshots(). img = sensor.snapshot() #获取一张图片 lcd.write(img) blobs = img.find_blobs([yidong_thresholds[0]]) if blobs and yidong_mode == 000 and yidong_finish_flag==0 : ##########分辨红色########### yidong_blobs = img.find_blobs([yidong_thresholds[0]]) yidong_max_blob = find_max(yidong_blobs) img.draw_rectangle(yidong_max_blob[0:4]) #绘制矩形 img.draw_cross(yidong_max_blob[5], yidong_max_blob[6]) #绘制中心十字 print('test3') img.draw_string(10,10,"test3",scale=1.2,mono_space=False) if fenbian_mode == 0 : max_blob = find_max(blobs) x_error = max_blob[5]-img.width()/2 #计算x轴离中心点位置 h_error = max_blob[2]*max_blob[3]-size_threshold #距离计算,计算色块面积-滤波面积 img.draw_string(10,50,f"x_error:{x_error}",scale=1.2,mono_space=False) img.draw_rectangle(max_blob[0:4]) #绘制矩形 img.draw_cross(max_blob[5], max_blob[6]) #绘制中心十字 x_output=x_pid.get_pid(x_error,1) #速度计算 h_output=h_pid.get_pid(h_error,1) #速度计算 run(-h_output-x_output+1500,-h_output+x_output-1500) print('test1') print(-h_output-x_output+1500,-h_output+x_output-1500) img.draw_string(10,30,"test1",scale=1.2,mono_space=False) if yidong_max_blob[4]>=3000: run(1500,1500) fenbian_mode=1 yidong_finish_flag=1 elif blobs and yidong_finish_flag==1 : ##################进入分辨模式################## 色块像素大于3000进入 for i in range (0,3) : fenbian_blobs = img.find_blobs([fenbian_thresholds[i]]) if fenbian_blobs : fenbian_max_blob = find_max(fenbian_blobs) img.draw_rectangle(fenbian_max_blob[0:4]) #绘制矩形 img.draw_cross(fenbian_max_blob[5], fenbian_max_blob[6]) #绘制中心十字 print('test2') img.draw_string(10,30,"test2",scale=1.2,mono_space=False) # else: # run(18,-18) #寻找不到色块则原地自转 # if blobs and fenbian_mode==0 : # max_blob = find_max(blobs) # x_error = max_blob[5]-img.width()/2 #计算x轴离中心点位置 # h_error = max_blob[2]*max_blob[3]-size_threshold #滤波,计算色块面积-滤波面积 # img.draw_string(10,10,f"x_error:{x_error}",scale=1.2,mono_space=False) # img.draw_rectangle(max_blob[0:4]) #绘制矩形 # img.draw_cross(max_blob[5], max_blob[6]) #绘制中心十字 # x_output=x_pid.get_pid(x_error,1) #速度计算 # h_output=h_pid.get_pid(h_error,1) #速度计算 # run(-h_output-x_output,-h_output+x_output) # else: # run(18,-18) #寻找不到色块则原地自转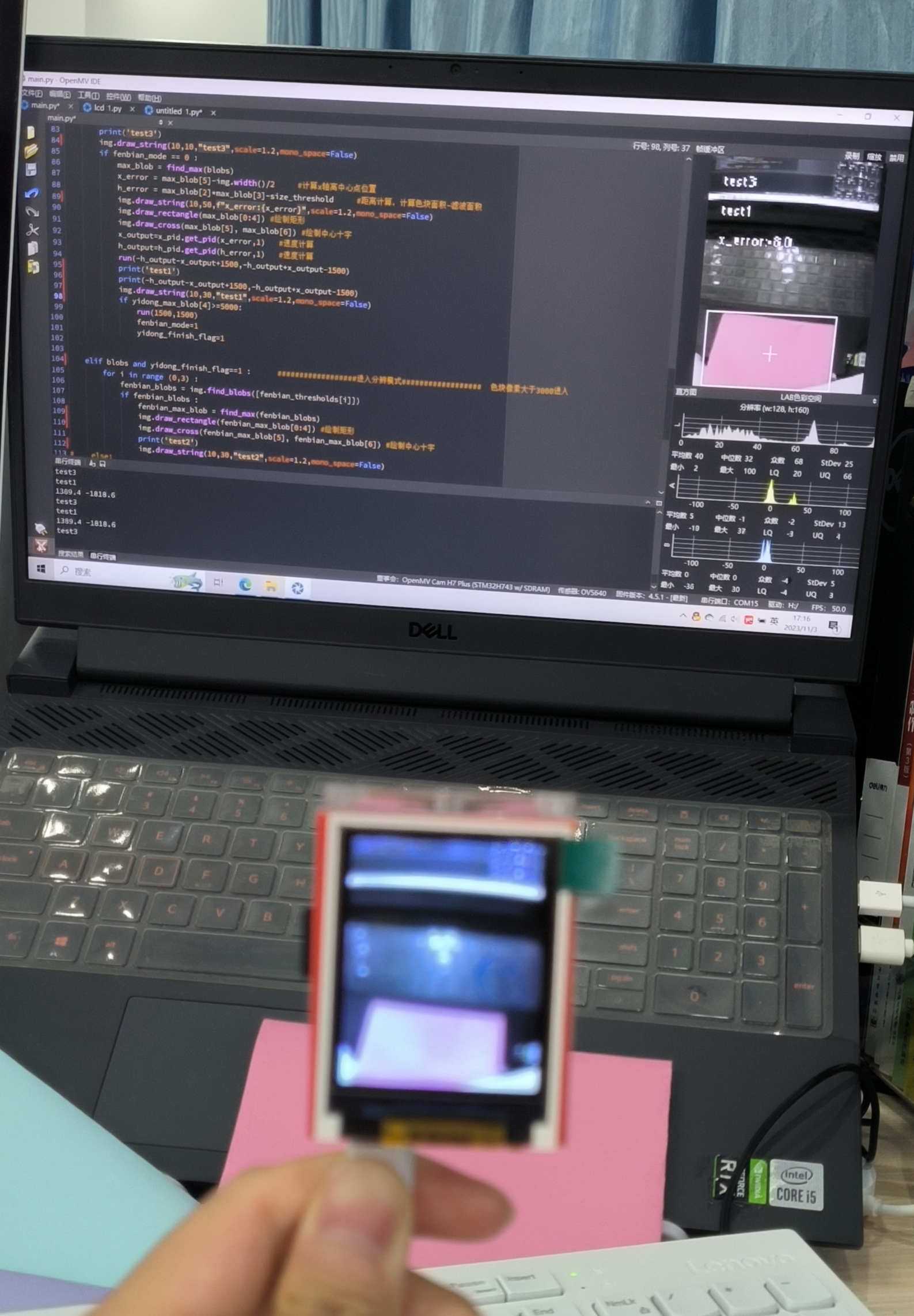
-
原因:img还没画线就直接发送到lcd了。
解决办法:lcd.write(img)移到最下面。
-
原来是这样!解决了,太感谢了