系统迁移中,暂时无法访问,所有数据会迁移到新的网站。
OpenMV VSCode 扩展发布了,在插件市场直接搜索OpenMV就可以安装
如果有产品硬件故障问题,比如无法开机,论坛很难解决。可以直接找售后维修。
发帖子之前,请确认看过所有的视频教程,https://singtown.com/learn/ 和所有的上手教程http://book.openmv.cc/
每一个新的提问,单独发一个新帖子
帖子需要目的,你要做什么?
如果涉及代码,需要报错提示与全部代码文本,请注意不要贴代码图片
必看:玩转星瞳论坛了解一下图片上传,代码格式等问题。
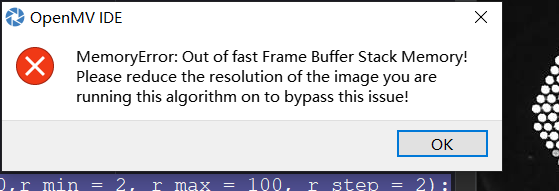
查找圆形图案中心坐标报错
-
def main(): global Bd_num sensor.reset() sensor.set_pixformat(sensor.GRAYSCALE) sensor.set_framesize(sensor.VGA) print("Initial exposure == %d" % sensor.get_exposure_us()) print("db == %d" % sensor.get_gain_db()) sensor.skip_frames(time = 500) sensor.set_auto_gain(False ) sensor.set_auto_whitebal(False) sensor.set_auto_exposure(False,exposure_us=2000) # sensor.set_hmirror(True) # sensor.set_vflip(True) sensor.skip_frames(time = 2000) clock = time.clock() # Create a clock object to track the FPS. uart2 = pyb.UART(3) uart2.init(115200, bits=8, parity=None, stop=1,read_buf_len=500) while(True): clock.tick() # Update the FPS clock. img = sensor.snapshot() print("Initial exposure == %d" % sensor.get_exposure_us()) print("db == %d" % sensor.get_gain_db()) print(clock.fps(),sensor.get_rgb_gain_db()) for c in img.find_circles(threshold = 3500, x_margin = 10, y_margin = 10, r_margin = 10,r_min = 2, r_max = 100, r_step = 2): img.draw_circle(c.x(), c.y(), c.r(), color = (255, 0, 0)) print(c)
-
你得把完整的,可以直接运行出错的代码放上来。
-
from pyb import UART import sensor, image, time,pyb,struct import json import cpufreq EXPOSURE_TIME_SCALE = 1.0 def main(): sensor.reset() sensor.set_pixformat(sensor.GRAYSCALE) sensor.set_framesize(sensor.VGA) print("Initial exposure == %d" % sensor.get_exposure_us()) print("db == %d" % sensor.get_gain_db()) sensor.skip_frames(time = 500) sensor.set_auto_gain(False) sensor.set_auto_whitebal(False) sensor.set_auto_exposure(False,exposure_us=2000) sensor.skip_frames(time = 2000)#跳过多少毫秒的帧 clock = time.clock() # Create a clock object to track the FPS. uart2 = pyb.UART(3) uart2.init(115200, bits=8, parity=None, stop=1,read_buf_len=500) while(True): clock.tick() # Update the FPS clock. img = sensor.snapshot() print("Initial exposure == %d" % sensor.get_exposure_us()) print("db == %d" % sensor.get_gain_db()) print(clock.fps(),sensor.get_rgb_gain_db()) for c in img.find_circles(threshold = 3500, x_margin = 10, y_margin = 10, r_margin = 10,r_min = 2, r_max = 100, r_step = 2): img.draw_circle(c.x(), c.y(), c.r(), color = (255, 0, 0)) print(c) main()
-
-
OpenMV4 H7,find_circles不能用vga图像,因为内存太小了。
要么减小分辨率,要么换OpenMV4 H7 Plus。
-
@kidswong999 请问用findcircles()函数是不是需要知道圆大概占多少像素?
-
https://book.openmv.cc/example/09-Feature-Detection/find-circles.html
r_min, r_max可以筛选圆的尺寸。