关于串口通信无反应问题
-
我openmv串口通信遇到了些问题。2天前串口还是通的。没改代码没改硬件,2天后串口不通了。换过5个openmv,换过3台电脑,换过5个ttl转usb,换过3组杜邦线,换过两种串口调试助手软件。至今串口不通。而且是双向不通,收不到也发不出去。请问大佬们是什么原因?
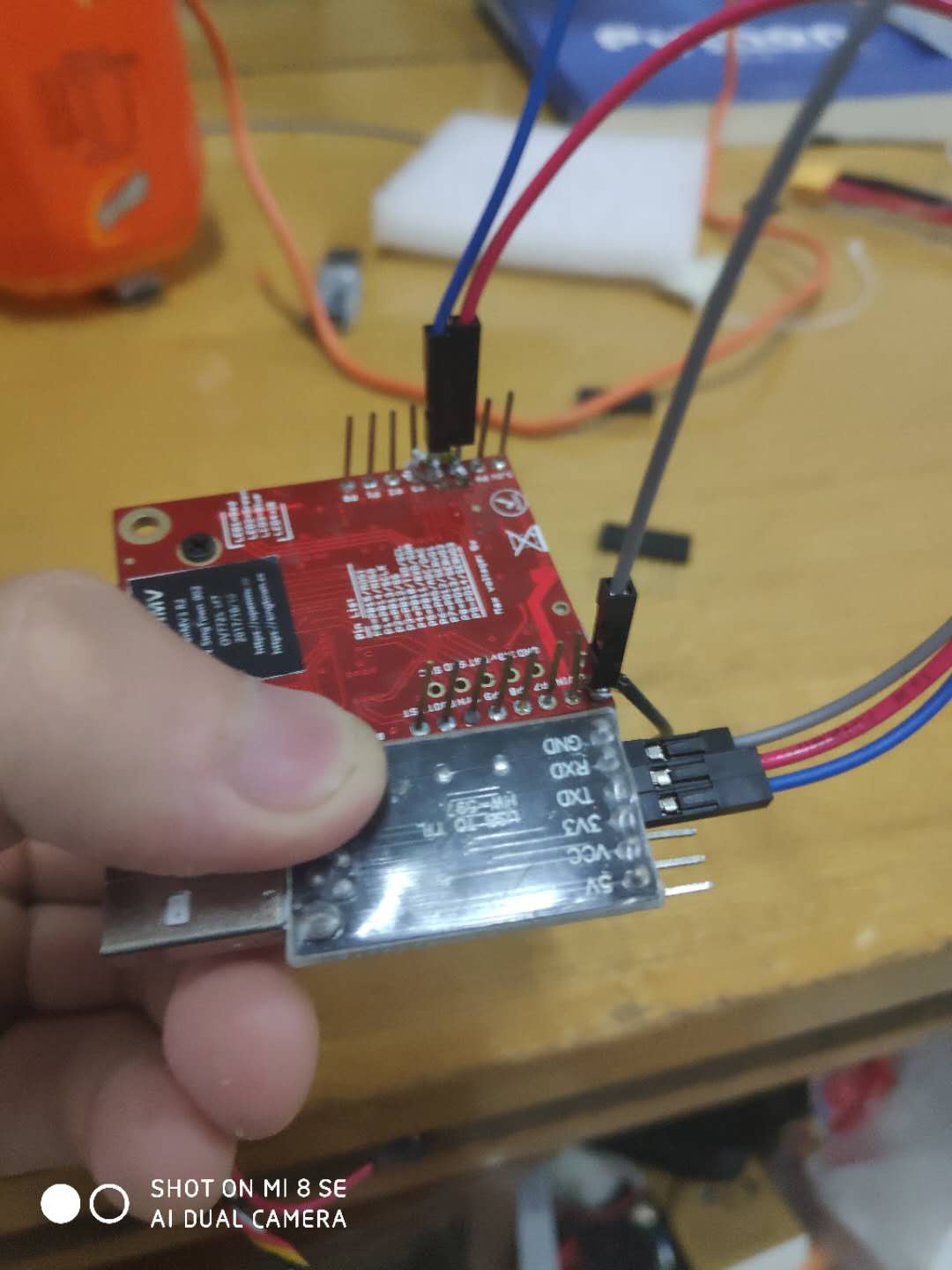
连线正确
如图,串口调试助手没有收到任何信息(黑屏中)
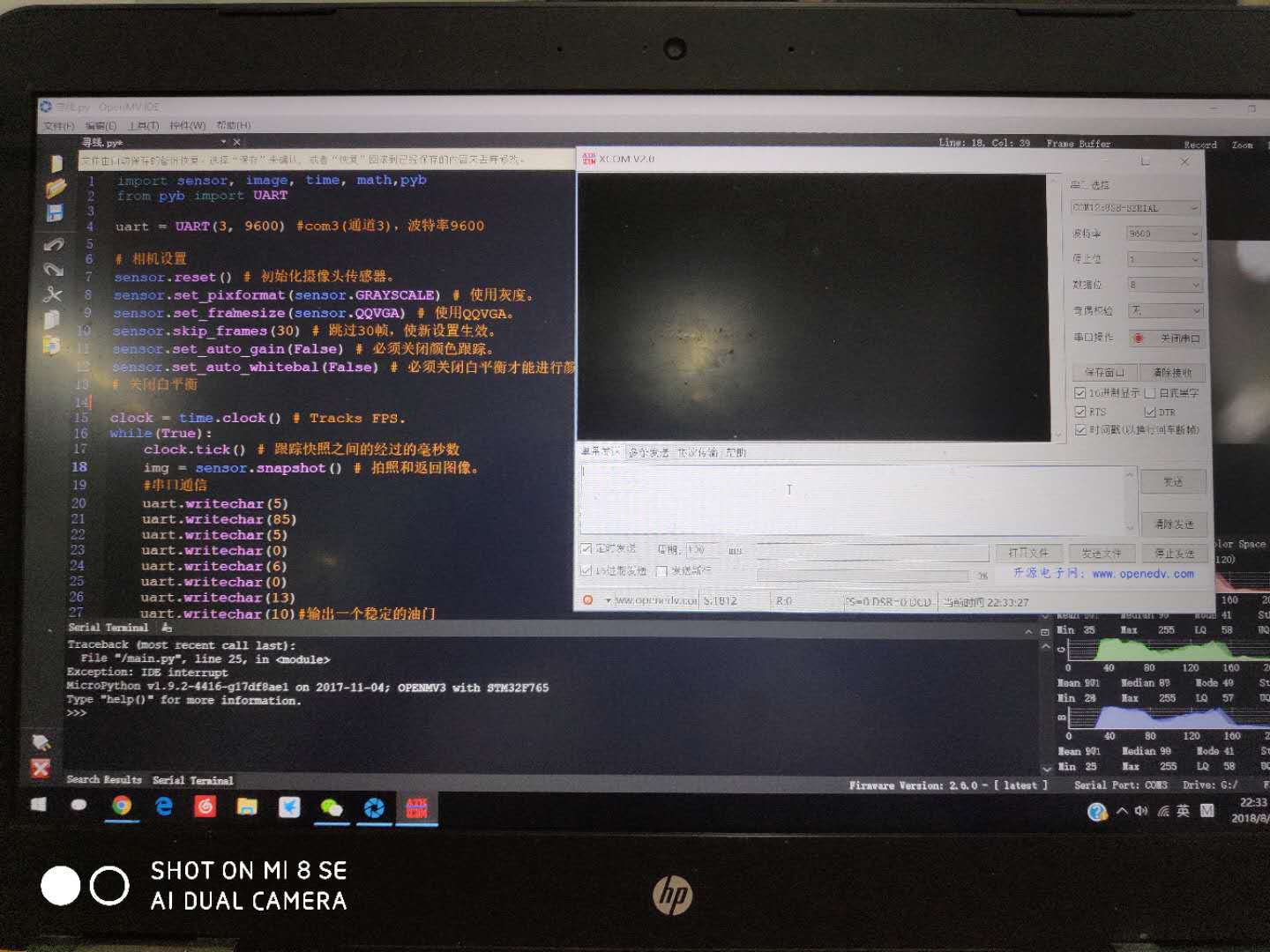
代码如下:
import sensor, image, time, math,pyb from pyb import UART uart = UART(3, 9600) #com3(通道3),波特率9600 # 相机设置 sensor.reset() # 初始化摄像头传感器。 sensor.set_pixformat(sensor.GRAYSCALE) # 使用灰度。 sensor.set_framesize(sensor.QQVGA) # 使用QQVGA。 sensor.skip_frames(30) # 跳过30帧,使新设置生效。 sensor.set_auto_gain(False) # 必须关闭颜色跟踪。 sensor.set_auto_whitebal(False) # 必须关闭白平衡才能进行颜色追踪。 # 关闭白平衡 clock = time.clock() # Tracks FPS. while(True): clock.tick() # 跟踪快照之间的经过的毫秒数 img = sensor.snapshot() # 拍照和返回图像。 #串口通信 uart.writechar(5) uart.writechar(85) uart.writechar(5) uart.writechar(0) uart.writechar(6) uart.writechar(0) uart.writechar(13) uart.writechar(10)#输出一个稳定的油门
-
此回复已被删除!
-
看上去,你的rx tx接反了,
- OpenMV 的rx应该接在usb转串口模块的tx
- OpenMV 的tx应该接在usb转串口模块的rx