系统迁移中,暂时无法访问,所有数据会迁移到新的网站。
OpenMV VSCode 扩展发布了,在插件市场直接搜索OpenMV就可以安装
如果有产品硬件故障问题,比如无法开机,论坛很难解决。可以直接找售后维修。
发帖子之前,请确认看过所有的视频教程,https://singtown.com/learn/ 和所有的上手教程http://book.openmv.cc/
每一个新的提问,单独发一个新帖子
帖子需要目的,你要做什么?
如果涉及代码,需要报错提示与全部代码文本,请注意不要贴代码图片
必看:玩转星瞳论坛了解一下图片上传,代码格式等问题。
为什么外界光线增强后图像变成灰色的?
-
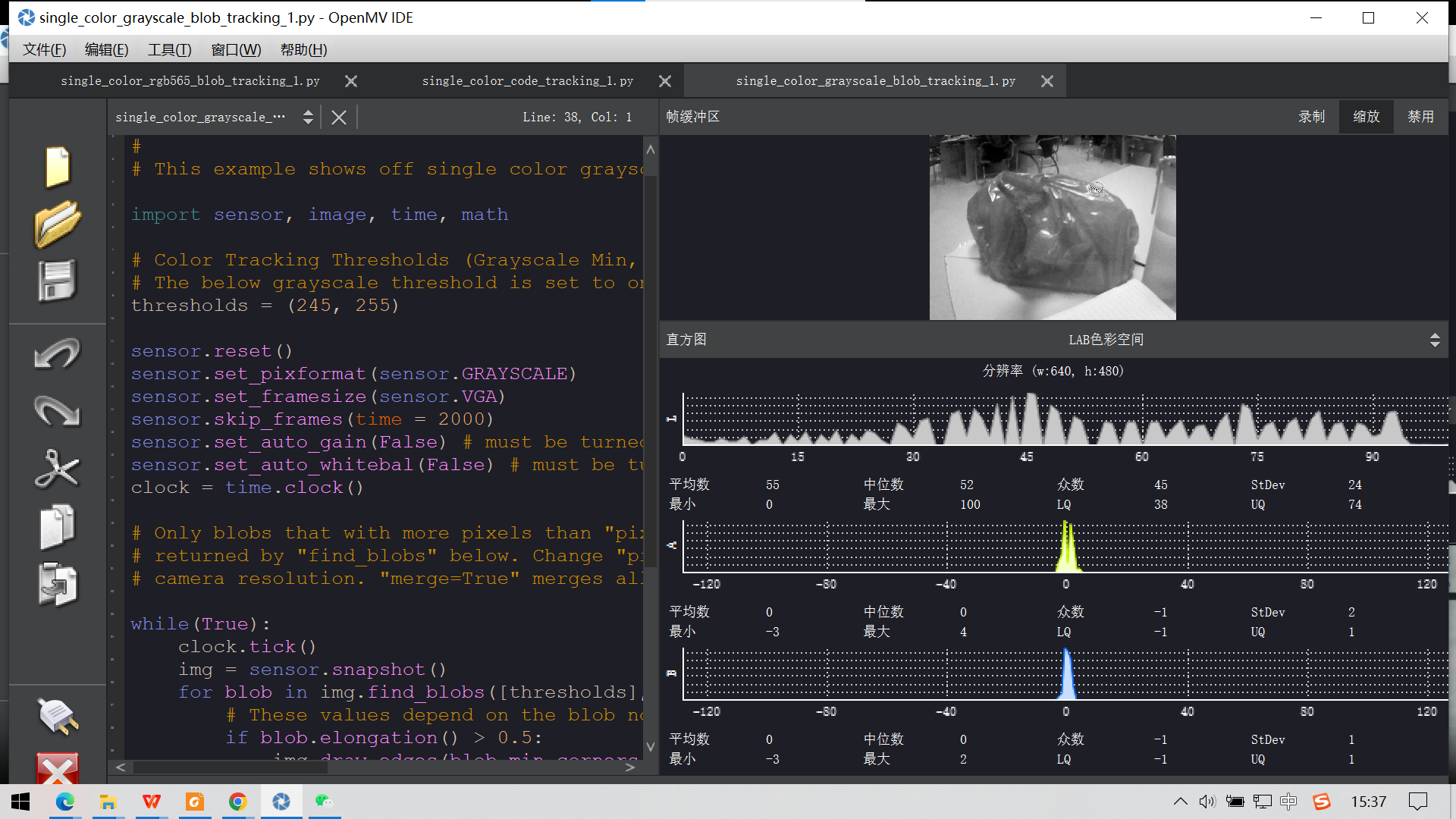
为什么外界光线增强后图像变成灰色的?# Single Color Grayscale Blob Tracking Example # # This example shows off single color grayscale tracking using the OpenMV Cam. import sensor, image, time, math # Color Tracking Thresholds (Grayscale Min, Grayscale Max) # The below grayscale threshold is set to only find extremely bright white areas. thresholds = (245, 255) sensor.reset() sensor.set_pixformat(sensor.GRAYSCALE) sensor.set_framesize(sensor.VGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking clock = time.clock() # Only blobs that with more pixels than "pixel_threshold" and more area than "area_threshold" are # returned by "find_blobs" below. Change "pixels_threshold" and "area_threshold" if you change the # camera resolution. "merge=True" merges all overlapping blobs in the image. while(True): clock.tick() img = sensor.snapshot() for blob in img.find_blobs([thresholds], pixels_threshold=100, area_threshold=100, merge=True): # These values depend on the blob not being circular - otherwise they will be shaky. if blob.elongation() > 0.5: img.draw_edges(blob.min_corners(), color=0) img.draw_line(blob.major_axis_line(), color=0) img.draw_line(blob.minor_axis_line(), color=0) # These values are stable all the time. img.draw_rectangle(blob.rect(), color=127) img.draw_cross(blob.cx(), blob.cy(), color=127) # Note - the blob rotation is unique to 0-180 only. img.draw_keypoints([(blob.cx(), blob.cy(), int(math.degrees(blob.rotation())))], size=40, color=127) print(clock.fps())
-
你代码写的就是GRAYSCALE