系统迁移中,暂时无法访问,所有数据会迁移到新的网站。
OpenMV VSCode 扩展发布了,在插件市场直接搜索OpenMV就可以安装
如果有产品硬件故障问题,比如无法开机,论坛很难解决。可以直接找售后维修。
发帖子之前,请确认看过所有的视频教程,https://singtown.com/learn/ 和所有的上手教程http://book.openmv.cc/
每一个新的提问,单独发一个新帖子
帖子需要目的,你要做什么?
如果涉及代码,需要报错提示与全部代码文本,请注意不要贴代码图片
必看:玩转星瞳论坛了解一下图片上传,代码格式等问题。
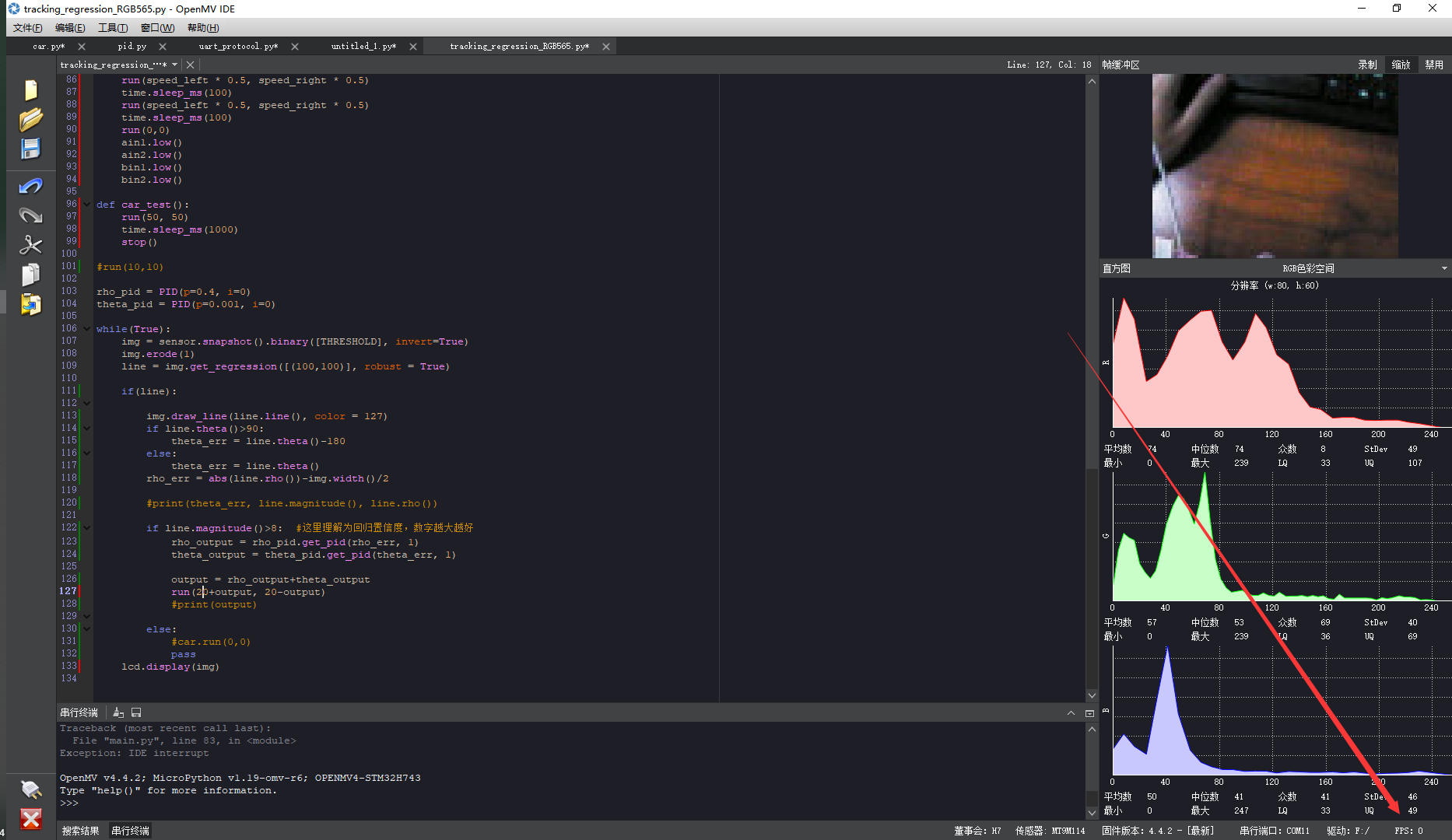
机器帧率就为0卡死了。详细描述如下
-
Untitled - By: xiongM - 周日 7月 23 2023
如下,这段代码中,如果我同时使用了这些io和pwm和lcd,那么运行时帧率就为0,如果我把io和pwm去了或者把屏幕刷新去了那么就能正常工作了!!
THRESHOLD = (2, 100, -29, 17, -14, 38) # Grayscale threshold for dark things... GRAY = (0, 16) import sensor, image, time, lcd from pyb import LED from pyb import Pin, Timer from pid import PID #import car sensor.reset() sensor.set_vflip(True) sensor.set_hmirror(True) sensor.set_pixformat(sensor.RGB565) #这里色彩模式可以设置为RGB565或者GRAYSCALE sensor.set_framesize(sensor.QQQVGA) #如果下面robust = True那么这里的分辨率越小越好,大了花费时间较多 sensor.set_auto_gain(False) sensor.set_auto_whitebal(False) sensor.skip_frames(time = 2000) # WARNING: If you use QQVGA it may take seconds clock = time.clock() # to process a frame sometimes. lcd.init() inverse_left=True #change it to True to inverse left wheel inverse_right=True #change it to True to inverse right wheel ain1 = Pin('P0', Pin.OUT_PP) ain2 = Pin('P1', Pin.OUT_PP) bin1 = Pin('P2', Pin.OUT_PP) bin2 = Pin('P3', Pin.OUT_PP) ain1.low() ain2.low() bin1.low() bin2.low() pwma = Pin('P7') pwmb = Pin('P8') tim = Timer(4, freq=1000) #实例化定时器4,并初始化频率为1000hz ch1 = tim.channel(1, Timer.PWM, pin=pwma) ch2 = tim.channel(2, Timer.PWM, pin=pwmb) ch1.pulse_width_percent(0) ch2.pulse_width_percent(0) current_left_speed = 0 current_right_speed = 0 def run(left_speed, right_speed): if abs(left_speed) >= 30 or abs(right_speed) >= 30: return #print(left_speed, right_speed) global current_left_speed global current_right_speed current_left_speed = left_speed current_right_speed = right_speed if inverse_left==True: left_speed=(-left_speed) if inverse_right==True: right_speed=(-right_speed) if left_speed < 0: ain1.low() ain2.high() else: ain1.high() ain2.low() ch1.pulse_width_percent(int(abs(left_speed))) if right_speed < 0: bin1.low() bin2.high() else: bin1.high() bin2.low() ch2.pulse_width_percent(int(abs(right_speed))) def stop(): speed_left = current_left_speed speed_right = current_right_speed run(speed_left * 0.5, speed_right * 0.5) time.sleep_ms(100) run(speed_left * 0.5, speed_right * 0.5) time.sleep_ms(100) run(speed_left * 0.5, speed_right * 0.5) time.sleep_ms(100) run(speed_left * 0.5, speed_right * 0.5) time.sleep_ms(100) run(0,0) ain1.low() ain2.low() bin1.low() bin2.low() def car_test(): run(50, 50) time.sleep_ms(1000) stop() #run(10,10) rho_pid = PID(p=0.4, i=0) theta_pid = PID(p=0.001, i=0) while(True): img = sensor.snapshot().binary([THRESHOLD], invert=True) img.erode(1) line = img.get_regression([(100,100)], robust = True) if(line): img.draw_line(line.line(), color = 127) if line.theta()>90: theta_err = line.theta()-180 else: theta_err = line.theta() rho_err = abs(line.rho())-img.width()/2 #print(theta_err, line.magnitude(), line.rho()) if line.magnitude()>8: #这里理解为回归置信度,数字越大越好 rho_output = rho_pid.get_pid(rho_err, 1) theta_output = theta_pid.get_pid(theta_err, 1) output = rho_output+theta_output run(20+output, 20-output) #print(output) else: #car.run(0,0) pass lcd.display(img)
-
LCD和你的电机控制的io引脚冲突,不能一起使用。
-
请问一下在哪儿看lcd需要用到那些引脚呢?
-