模版匹配?
-
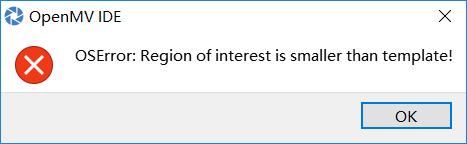
直接用的历程,运行出现这样的问题?
-
请提供全部的代码
-
@kidswong999 # Template Matching Example - Normalized Cross Correlation (NCC)
This example shows off how to use the NCC feature of your OpenMV Cam to match
image patches to parts of an image... expect for extremely controlled enviorments
NCC is not all to useful.
WARNING: NCC supports needs to be reworked! As of right now this feature needs
a lot of work to be made into somethin useful. This script will reamin to show
that the functionality exists, but, in its current state is inadequate.
import time, sensor, image
from image import SEARCH_EX, SEARCH_DS
#从imgae模块引入SEARCH_EX和SEARCH_DS。使用from import仅仅引入SEARCH_EX,
#SEARCH_DS两个需要的部分,而不把image模块全部引入。Reset sensor
sensor.reset()
Set sensor settings
sensor.set_contrast(1)
sensor.set_gainceiling(16)Max resolution for template matching with SEARCH_EX is QQVGA
sensor.set_framesize(sensor.QQVGA)
You can set windowing to reduce the search image.
#sensor.set_windowing(((640-80)//2, (480-60)//2, 80, 60))
sensor.set_pixformat(sensor.GRAYSCALE)Load template.
Template should be a small (eg. 32x32 pixels) grayscale image.
template = image.Image("/template.pgm")
#加载模板图片clock = time.clock()
Run template matching
while (True):
clock.tick()
img = sensor.snapshot()# find_template(template, threshold, [roi, step, search]) # ROI: The region of interest tuple (x, y, w, h). # Step: The loop step used (y+=step, x+=step) use a bigger step to make it faster. # Search is either image.SEARCH_EX for exhaustive search or image.SEARCH_DS for diamond search # # Note1: ROI has to be smaller than the image and bigger than the template. # Note2: In diamond search, step and ROI are both ignored. r = img.find_template(template, 0.70, step=4, search=SEARCH_EX) #, roi=(10, 0, 60, 60)) #find_template(template, threshold, [roi, step, search]),threshold中 #的0.7是相似度阈值,roi是进行匹配的区域(左上顶点为(10,0),长80宽60的矩形), #注意roi的大小要比模板图片大,比frambuffer小。 #把匹配到的图像标记出来 if r: img.draw_rectangle(r) print(clock.fps())
-
Template Matching Example - Normalized Cross Correlation (NCC)
This example shows off how to use the NCC feature of your OpenMV Cam to match
image patches to parts of an image... expect for extremely controlled enviorments
NCC is not all to useful.
WARNING: NCC supports needs to be reworked! As of right now this feature needs
a lot of work to be made into somethin useful. This script will reamin to show
that the functionality exists, but, in its current state is inadequate.
import time, sensor, image
from image import SEARCH_EX, SEARCH_DS
#从imgae模块引入SEARCH_EX和SEARCH_DS。使用from import仅仅引入SEARCH_EX,
#SEARCH_DS两个需要的部分,而不把image模块全部引入。Reset sensor
sensor.reset()
Set sensor settings
sensor.set_contrast(1)
sensor.set_gainceiling(16)Max resolution for template matching with SEARCH_EX is QQVGA
sensor.set_framesize(sensor.QQVGA)
You can set windowing to reduce the search image.
#sensor.set_windowing(((640-80)//2, (480-60)//2, 80, 60))
sensor.set_pixformat(sensor.GRAYSCALE)Load template.
Template should be a small (eg. 32x32 pixels) grayscale image.
template = image.Image("/template.pgm")
#加载模板图片clock = time.clock()
Run template matching
while (True):
clock.tick()
img = sensor.snapshot()# find_template(template, threshold, [roi, step, search]) # ROI: The region of interest tuple (x, y, w, h). # Step: The loop step used (y+=step, x+=step) use a bigger step to make it faster. # Search is either image.SEARCH_EX for exhaustive search or image.SEARCH_DS for diamond search # # Note1: ROI has to be smaller than the image and bigger than the template. # Note2: In diamond search, step and ROI are both ignored. r = img.find_template(template, 0.70, step=4, search=SEARCH_EX) #, roi=(10, 0, 60, 60)) #find_template(template, threshold, [roi, step, search]),threshold中 #的0.7是相似度阈值,roi是进行匹配的区域(左上顶点为(10,0),长80宽60的矩形), #注意roi的大小要比模板图片大,比frambuffer小。 #把匹配到的图像标记出来 if r: img.draw_rectangle(r) print(clock.fps())
-
报错提示说,你的ROI比模版还小。
-
请问,怎么缩小我的摸版呢
-