源代码执行出问题
-
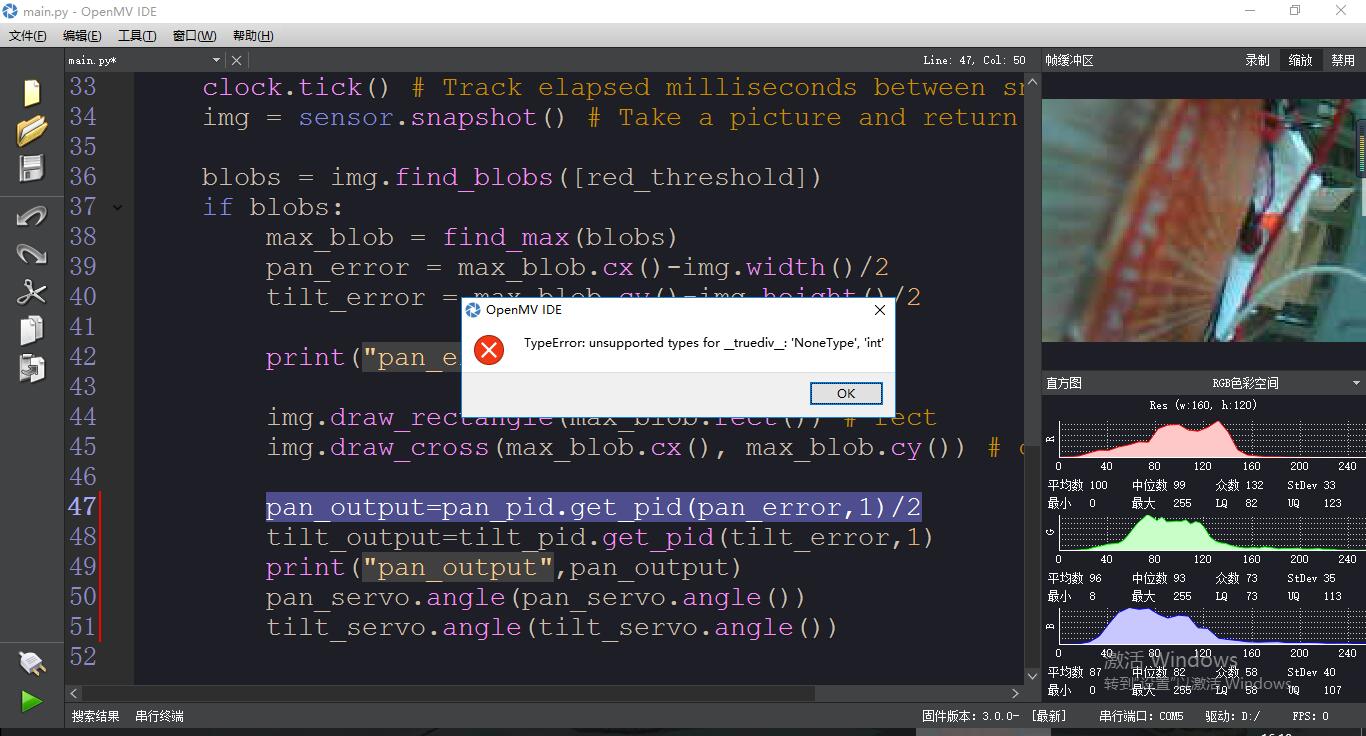
import sensor, image, time from pid import PID from pyb import Servo pan_servo=Servo(1) tilt_servo=Servo(2) red_threshold = (13, 49, 18, 61, 6, 47) pan_pid = PID(p=0.07, i=0, imax=90) #脱机运行或者禁用图像传输,使用这个PID tilt_pid = PID(p=0.05, i=0, imax=90) #脱机运行或者禁用图像传输,使用这个PID #pan_pid = PID(p=0.1, i=0, imax=90)#在线调试使用这个PID #tilt_pid = PID(p=0.1, i=0, imax=90)#在线调试使用这个PID sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.RGB565) # use RGB565. sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed. sensor.skip_frames(10) # Let new settings take affect. sensor.set_auto_whitebal(False) # turn this off. clock = time.clock() # Tracks FPS. def find_max(blobs): max_size=0 for blob in blobs: if blob[2]*blob[3] > max_size: max_blob=blob max_size = blob[2]*blob[3] return max_blob while(True): clock.tick() # Track elapsed milliseconds between snapshots(). img = sensor.snapshot() # Take a picture and return the image. blobs = img.find_blobs([red_threshold]) if blobs: max_blob = find_max(blobs) pan_error = max_blob.cx()-img.width()/2 tilt_error = max_blob.cy()-img.height()/2 print("pan_error: ", pan_error) img.draw_rectangle(max_blob.rect()) # rect img.draw_cross(max_blob.cx(), max_blob.cy()) # cx, cy pan_output=pan_pid.get_pid(pan_error,1)/2 tilt_output=tilt_pid.get_pid(tilt_error,1) print("pan_output",pan_output) pan_servo.angle(pan_servo.angle()+pan_output) tilt_servo.angle(tilt_servo.angle()-tilt_output)这是怎磨回事
-
我运行这个代码,没有出现报错。
首先你确定把pid.py正确的复制到OpenMV里面了?
-
复制到了 我看了都
-
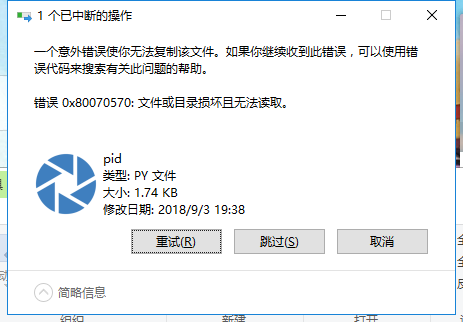
不仅仅是复制,你要保证复制的是正确的pid.py。请把你u盘里复制进去的pid.py截图并提供源码。
-

from pyb import millis from math import pi, isnan class PID: _kp = _ki = _kd = _integrator = _imax = 0 _last_error = _last_derivative = _last_t = 0 _RC = 1/(2 * pi * 20) def __init__(self, p=0, i=0, d=0, imax=0): self._kp = float(p) self._ki = float(i) self._kd = float(d) self._imax = abs(imax) self._last_derivative = float('nan') def get_pid(self, error, scaler): tnow = millis() dt = tnow - self._last_t output = 0 if self._last_t == 0 or dt > 1000: dt = 0 self.reset_I() self._last_t = tnow delta_time = float(dt) / float(1000) output += error * self._kp if abs(self._kd) > 0 and dt > 0: if isnan(self._last_derivative): derivative = 0 self._last_derivative = 0 else: derivative = (error - self._last_error) / delta_time derivative = self._last_derivative + \ ((delta_time / (self._RC + delta_time)) * \ (derivative - self._last_derivative)) self._last_error = error self._last_derivative = derivative output += self._kd * derivative output *= scaler if abs(self._ki) > 0 and dt > 0: self._integrator += (error * self._ki) * scaler * delta_time if self._integrator < -self._imax: self._integrator = -self._imax elif self._integrator > self._imax: self._integrator = self._imax output += self._integrator return output def reset_I(self): self._integrator = 0 self._last_derivative = float('nan')
-
这是神魔问题
-
你的图片没有上传成功
-
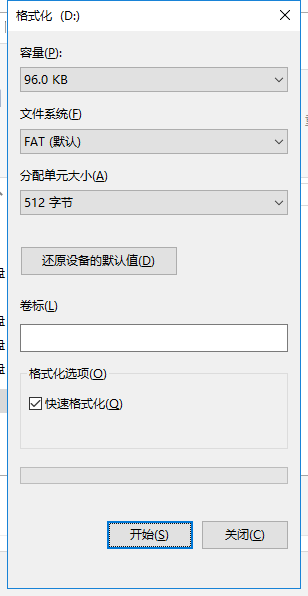
请直接格式化OpenMV 的磁盘,然后重新操作
-
-
请直接格式化OpenMV 的磁盘,然后重新操作
-
文件系统选哪一个
-
FAT32就可以