系统迁移中,暂时无法访问,所有数据会迁移到新的网站。
OpenMV VSCode 扩展发布了,在插件市场直接搜索OpenMV就可以安装
如果有产品硬件故障问题,比如无法开机,论坛很难解决。可以直接找售后维修。
发帖子之前,请确认看过所有的视频教程,https://singtown.com/learn/ 和所有的上手教程http://book.openmv.cc/
每一个新的提问,单独发一个新帖子
帖子需要目的,你要做什么?
如果涉及代码,需要报错提示与全部代码文本,请注意不要贴代码图片
必看:玩转星瞳论坛了解一下图片上传,代码格式等问题。
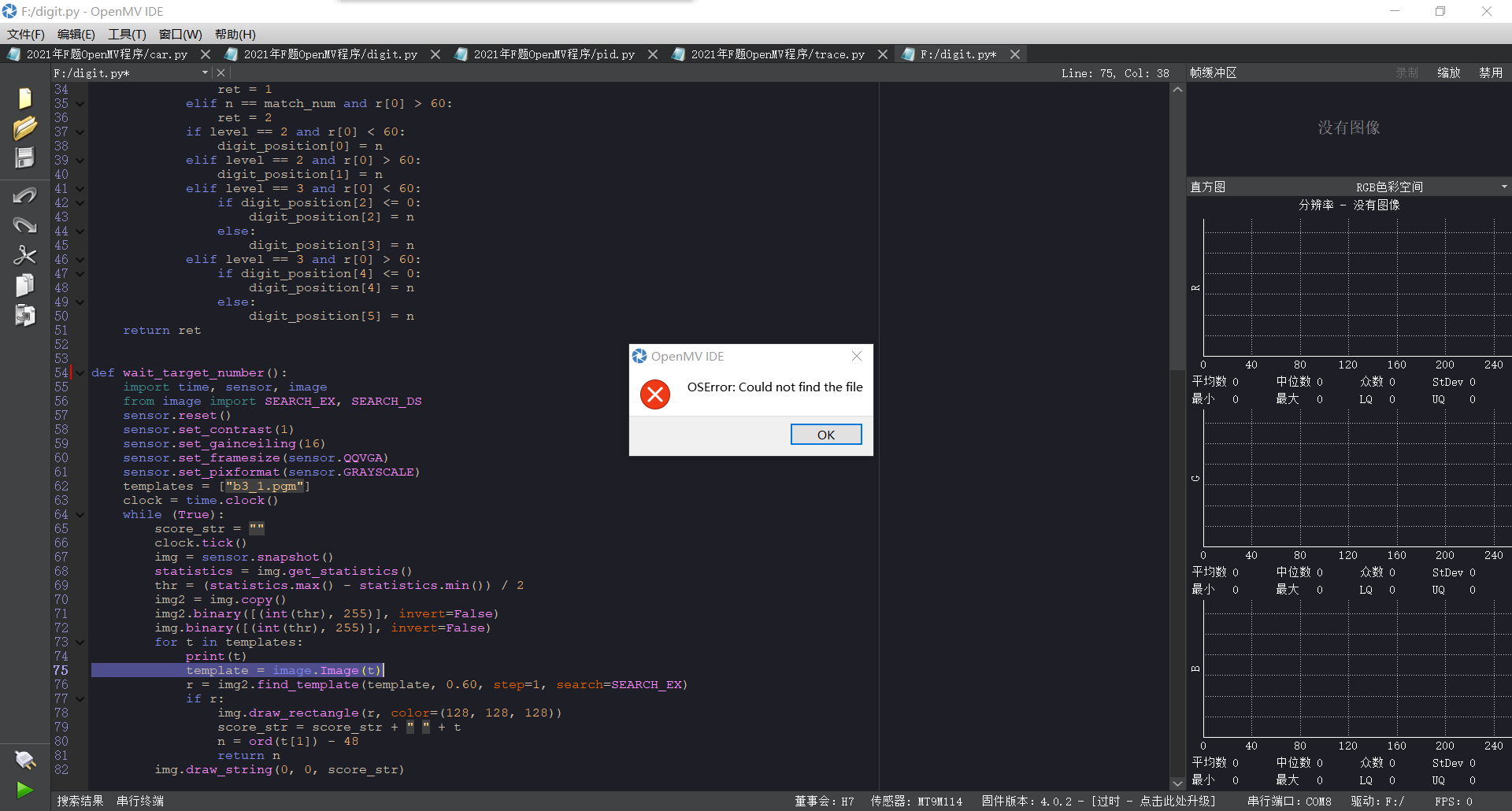
跳转到子程序digit里面的语句template=image.Image(t)报错,程序已经复制到openmv内
-
os error 是什么错误该怎么改
请在这里粘贴代码 #main # Main Controller of UAV # 2021.Nov ###### from utime import sleep import trace import digit import car from pyb import Pin from pyb import LED stand_speed = 40 def test_left(): while True: car.run(50,0) def test_right(): while True: car.run(0,50) def test_forword(): while True: car.run(50,50) def wait_load_signal(): p = Pin("P4", Pin.IN, Pin.PULL_DOWN) while True: if p.value() == 1: return sleep(0.1) def wait_unload_signal(): p = Pin("P4", Pin.IN, Pin.PULL_DOWN) while True: if p.value() == 0: return sleep(0.1) def work_mode(): # binary [00] Task1 ; [01] Task2; [10] Task3 p5 = Pin("P5", Pin.IN, Pin.PULL_DOWN) p6 = Pin("P6", Pin.IN, Pin.PULL_DOWN) if (p5.value() == 0) and (p6.value() == 0): return 1 elif (p5.value() == 1) and (p6.value() == 0): return 2 elif (p5.value() == 0) and (p6.value() == 1): return 3 else: return 0 def cross(move_type: int): # 0 for straight, 1 for left , 2 for right, 3 for 180 rotation print("Debug: cross") if move_type == 0: car.run(100,100) sleep(1) elif move_type == 2: # 右 car.run(50,50) sleep(1) car.run(40,-40) sleep(1) car.run(50,50) sleep(1) elif move_type == 1: # 左 car.run(50,50) sleep(1) car.run(-44,44) sleep(1) car.run(50,50) sleep(1) elif move_type == 3: # 掉头 car.run(-44,44) sleep(1) car.run(0,0) sleep(1) car.run(-44,44) sleep(1) if (trace.foward_backward_state == 0) and (trace.cross_cnt < 2): trace.cross_cnt = trace.cross_cnt + 1 if move_type == 0: trace.traj = trace.traj + "C" elif move_type == 1: trace.traj = trace.traj + "L" elif move_type == 2: trace.traj = trace.traj + "R" elif (trace.foward_backward_state == 0): trace.cross_cnt = trace.cross_cnt + 1 if move_type == 0: raise elif move_type == 1: trace.traj = trace.traj + "l" elif move_type == 2: trace.traj = trace.traj + "r" return 0 def stop(): print("Debug: stop") car.run(0,0) ###### # Task 1 ## def task01(room_id:int): print("Debug: task01") trace.trace_line(1000,stand_speed) if room_id == 1: cross(1) elif room_id == 2: cross(2) stop() trace.trace_line(200,stand_speed) stop() trace.foward_backward_state = 1 print(trace.traj) wait_unload_signal() cross(3) stop() go_back() ###### # Task 2 ## def task02(room_id:int): print("Debug: task02") trace.trace_line(1000,stand_speed) cross(0) stop() trace.trace_line(1000,stand_speed) stop() if digit.search_digit(room_id, 2) == 1: cross(1) elif digit.search_digit(room_id, 2) == 2: cross(2) stop() trace.trace_line(150,stand_speed) stop() trace.foward_backward_state = 1 print(trace.traj) wait_unload_signal() cross(3) stop() sleep(1) go_back() ###### # Task 3 ## def task03(room_id:int): print("Debug: task03") trace.trace_line(1000,stand_speed) cross(0) stop() trace.trace_line(1000,stand_speed) cross(0) stop() trace.trace_line(1000,stand_speed) stop() if digit.search_digit(room_id,3) == 1: cross(1) elif digit.search_digit(room_id,3) == 2: cross(2) stop() trace.trace_line(1000,stand_speed) stop() if digit.search_digit(room_id,3) == 1: cross(1) elif digit.search_digit(room_id,3) == 2: cross(2) stop() trace.trace_line(200,stand_speed) trace.foward_backward_state = 1 print(trace.traj) wait_unload_signal() cross(3) go_back() ###### # GoBack ## def go_back(): idx=len(trace.traj)-1 while(idx>=0): s = trace.traj[idx] print(s) if s == "C": trace.trace_line(1000,stand_speed) cross(0) stop() elif s == "l": trace.trace_line(1000,stand_speed,True) cross(2) stop() elif s == "r": trace.trace_line(1000,stand_speed,True) cross(1) stop() elif s == "L": trace.trace_line(1000,stand_speed) cross(2) stop() elif s == "R": trace.trace_line(1000,stand_speed) cross(1) stop() elif s == "I": trace.trace_line(150,stand_speed) cross(0) stop() idx -= 1 ## # Main ## def main(): print("Debug main") task_id = work_mode() print("Choose Task :", task_id) # recognize target digit if task_id == 1 : room_id = digit.wait_target_number() print("Choose room :", room_id) task01(room_id) elif task_id == 2 : room_id = digit.wait_target_number() print("Choose room :", room_id) task02(room_id) elif task_id == 3 : room_id = digit.wait_target_number() print("Choose room :", room_id) task03(room_id) print("Done.") if __name__ == '__main__': LED(1).on() LED(2).on() LED(3).on() #while True: #print(work_mode()) #sleep(0.1) #traj = traj + "C" #print(traj) #print(digit.digit_position) #wait_load_signal() #wait_unload_signal() # go_back() main() #car.run(30,30) #sleep(50) #trace.trace_line(1000,stand_speed) #stop() #cross(3) #test_left() #test_right() #test_forword() #trace.test_trace_line() #trace.trace_line(1000,100) #cross(0) #stop() #trace.trace_line(1000,100) #stop() #if digit.search_digit(3) == 1: #cross(1) #elif digit.search_digit(3) == 2: #cross(2) #stop() #trace.trace_line(200,50) #digit digit_position = [0, 0, 0, 0, 0, 0] def search_digit(match_num: int, level: int): import time, sensor, image from image import SEARCH_EX, SEARCH_DS sensor.reset() sensor.set_contrast(1) sensor.set_gainceiling(16) sensor.set_framesize(sensor.QQVGA) sensor.set_pixformat(sensor.GRAYSCALE) templates = ["b3_1.pgm"] clock = time.clock() ret = 0 score_str = "" clock.tick() img = sensor.snapshot() statistics=img.get_statistics() thr = (statistics.max()-statistics.min())/2 img2 = img.copy() img2.binary([(int(thr), 255)], invert=False) img.binary([(int(thr), 255)], invert=False) for t in templates: template = image.Image(t) r = img2.find_template(template, 0.60, step=1, search=SEARCH_EX) if r: img.draw_rectangle(r, color =(128,128,128)) n = ord(t[1]) - 48 print(n) print(match_num) if n == match_num and r[0] < 60: ret = 1 elif n == match_num and r[0] > 60: ret = 2 if level == 2 and r[0] < 60: digit_position[0] = n elif level == 2 and r[0] > 60: digit_position[1] = n elif level == 3 and r[0] < 60: if digit_position[2] <= 0: digit_position[2] = n else : digit_position[3] = n elif level == 3 and r[0] > 60: if digit_position[4] <= 0: digit_position[4] = n else : digit_position[5] = n return ret def wait_target_number(): import time, sensor, image from image import SEARCH_EX, SEARCH_DS sensor.reset() sensor.set_contrast(1) sensor.set_gainceiling(16) sensor.set_framesize(sensor.QQVGA) sensor.set_pixformat(sensor.GRAYSCALE) templates = ["b3_1.pgm"] clock = time.clock() while (True): score_str = "" clock.tick() img = sensor.snapshot() statistics=img.get_statistics() thr = (statistics.max()-statistics.min())/2 img2 = img.copy() img2.binary([(int(thr), 255)], invert=False) img.binary([(int(thr), 255)], invert=False) for t in templates: print(t) template = image.Image(t) r = img2.find_template(template, 0.60, step=1, search=SEARCH_EX) if r: img.draw_rectangle(r, color =(128,128,128)) score_str = score_str +" " + t n = ord(t[1]) - 48 return n img.draw_string(0, 0, score_str) #car from pyb import Pin, Timer inverse_left=False #change it to True to inverse left wheel inverse_right=False #change it to True to inverse right wheel ain1 = Pin('P0', Pin.OUT_PP) ain2 = Pin('P1', Pin.OUT_PP) bin1 = Pin('P2', Pin.OUT_PP) bin2 = Pin('P3', Pin.OUT_PP) ain1.low() ain2.low() bin1.low() bin2.low() pwma = Pin('P7') pwmb = Pin('P8') tim = Timer(4, freq=1000) ch1 = tim.channel(1, Timer.PWM, pin=pwma) ch2 = tim.channel(2, Timer.PWM, pin=pwmb) ch1.pulse_width_percent(0) ch2.pulse_width_percent(0) def run(left_speed, right_speed): if inverse_left==True: left_speed=(-left_speed) if inverse_right==True: right_speed=(-right_speed) if left_speed < 0: ain1.low() ain2.high() else: ain1.high() ain2.low() ch1.pulse_width_percent(int(abs(left_speed))) if right_speed < 0: bin1.low() bin2.high() else: bin1.high() bin2.low() ch2.pulse_width_percent(int(abs(right_speed))) #pid from pyb import millis from math import pi, isnan class PID: _kp = _ki = _kd = _integrator = _imax = 0 _last_error = _last_derivative = _last_t = 0 _RC = 1/(2 * pi * 20) def __init__(self, p=0, i=0, d=0, imax=0): self._kp = float(p) self._ki = float(i) self._kd = float(d) self._imax = abs(imax) self._last_derivative = float('nan') def get_pid(self, error, scaler): tnow = millis() dt = tnow - self._last_t output = 0 if self._last_t == 0 or dt > 1000: dt = 0 self.reset_I() self._last_t = tnow delta_time = float(dt) / float(1000) output += error * self._kp if abs(self._kd) > 0 and dt > 0: if isnan(self._last_derivative): derivative = 0 self._last_derivative = 0 else: derivative = (error - self._last_error) / delta_time derivative = self._last_derivative + \ ((delta_time / (self._RC + delta_time)) * \ (derivative - self._last_derivative)) self._last_error = error self._last_derivative = derivative output += self._kd * derivative output *= scaler if abs(self._ki) > 0 and dt > 0: self._integrator += (error * self._ki) * scaler * delta_time if self._integrator < -self._imax: self._integrator = -self._imax elif self._integrator > self._imax: self._integrator = self._imax output += self._integrator return output def reset_I(self): self._integrator = 0 self._last_derivative = float('nan') #trace cross_cnt = 0 foward_backward_state = 0 traj = "I" def trace_line(delay_time = 1000, std_speed = 50, long_end = False): THRESHOLD = (10, 60, 20, 70, 10, 50) import sensor, image, time from pyb import LED import car from pid import PID rho_pid = PID(p=0.4, i=0) theta_pid = PID(p=0.001, i=0) roi1a=(0,0,40,3) roi1b=(0,3,40,3) roi1c=(0,6,40,3) roi2a=(40,0,40,3) roi2b=(40,3,40,3) roi2c=(40,6,40,3) roi_trace = (23,10,39,50) sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQQVGA) sensor.skip_frames(time = 2000) clock = time.clock() while(True): if delay_time <= 0: car.run(0,0) return delay_time = delay_time -1 clock.tick() img = sensor.snapshot().binary([THRESHOLD], invert = True) line = img.get_regression([(0,1)],roi = roi_trace, robust = True) if (line): rho_err = abs(line.rho())-img.width()/2 if line.theta()>90: theta_err = line.theta()-180 else: theta_err = line.theta() img.draw_line(line.line(), color = 127) if line.magnitude()>8: rho_output = rho_pid.get_pid(rho_err,1) theta_output = theta_pid.get_pid(theta_err,1) output = rho_output+theta_output car.run(std_speed+output, std_speed-output) else: car.run(std_speed,std_speed) else: car.run(50,-50) pass statistics1=img.get_statistics(roi=roi1a) color_l1a=statistics1.mode() statistics1=img.get_statistics(roi=roi1b) color_l1b=statistics1.mode() statistics1=img.get_statistics(roi=roi1c) color_l1c=statistics1.mode() statistics2=img.get_statistics(roi=roi2a) color_l2a=statistics2.mode() statistics2=img.get_statistics(roi=roi2b) color_l2b=statistics2.mode() statistics2=img.get_statistics(roi=roi2c) color_l2c=statistics2.mode() print("color_l1:",(color_l1a==0 or color_l1b==0 or color_l1c==0)) print("color_l2:",(color_l2a==0 or color_l2b==0 or color_l2c==0)) print(delay_time) if long_end == False: if (color_l1a==0 or color_l1b==0 or color_l1c==0) and (color_l2a==0 or color_l2b==0 or color_l2c==0): return 0 else: if (color_l1a==0 or color_l1b==0 or color_l1c==0): return 1 if (color_l2a==0 or color_l2b==0 or color_l2c==0): return 2 def test_trace_line(): THRESHOLD = (5, 70, -23, 15, -57, 0) import sensor, image, time from pyb import LED import car from pid import PID rho_pid = PID(p=0.4, i=0) theta_pid = PID(p=0.001, i=0) roi1=(0,0,40,16) roi2=(40,0,40,16) sensor.reset() sensor.set_pixformat(sensor.GRAYSCALE) sensor.set_framesize(sensor.QQQVGA) sensor.skip_frames(time = 2000) clock = time.clock() while(True): clock.tick() img = sensor.snapshot() statistics=img.get_statistics() thr = (statistics.max()-statistics.min())/1.3 img.binary([(int(thr), 255)], invert = False) line = img.get_regression([(0,1)],roi = (23,0,39,43), robust = True) if (line): rho_err = abs(line.rho())-img.width()/2 if line.theta()>90: theta_err = line.theta()-180 else: theta_err = line.theta() img.draw_line(line.line(), color = 127) if line.magnitude()>8: rho_output = rho_pid.get_pid(rho_err,1) theta_output = theta_pid.get_pid(theta_err,1) output = rho_output+theta_output car.run(40+output, 40-output) print(output) else: car.run(50,50) else: car.run(50,-50)
-