使用openmv4 plus串口发送一串数据,数据里面有一个数据是错误的?
-
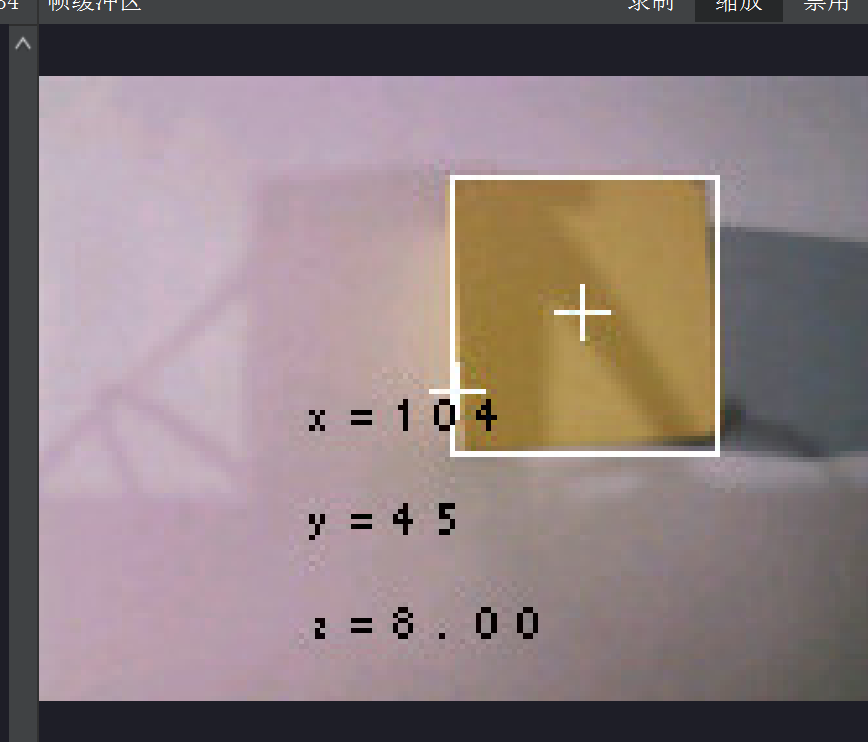
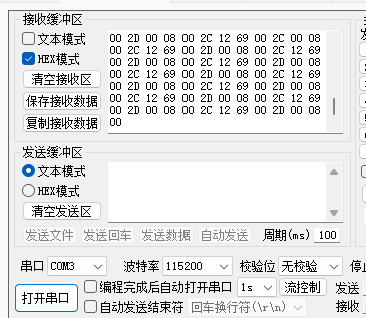
import sensor, image, time, lcd, ustruct from pyb import UART from pyb import LED # 颜色追踪的例子,一定要控制环境的光,保持光线是稳定的。 threshold_yellow =(36, 64, -32, 21, 21, 78)#黄色 threshold_blue =(16, 50, -83, 36, -87, -36)#蓝色 threshold_red =(0, 24, 14, 42, -12, 23)#红色 threshold_green = (9, 27, -54, -9, -6, 34)#绿色 size_threshold= 2000 #图像非常近 ROI=[40,60,34,70] #感兴趣区域 sensor.reset() # 初始化摄像头 sensor.set_pixformat(sensor.RGB565) # 格式为 RGB565. sensor.set_framesize(sensor.QQVGA) # 使用 QQVGA 速度快一些 sensor.skip_frames(time = 2000) # 跳过2000s,使新设置生效,并自动调节白平衡 sensor.set_auto_gain(False) # 关闭自动自动增益。默认开启的,在颜色识别中,一定要关闭白平衡。 sensor.set_auto_whitebal(False) #sensor.set_windowing(ROI) #设置窗口大小 #关闭白平衡。白平衡是默认开启的,在颜色识别中,一定要关闭白平衡。 clock = time.clock() # 追踪帧率 lcd.init() # LCD初始化 uart = UART(3, 115200) #串口初始化,P4为TX,P5为RX uart.init(115200, bits=8, parity=None,timeout=1000, read_buf_len=128) #8位数据位,无校验位,1位停止位、 K=450 #距离=k/直径的像素,像素为Lm,测得15cm,像素点为30,k=15*30=450,同理该公式可以用于测量大小,实际大小=k*直径的像素 k2=0.1 #3/30,但是测量大小只适合位置固定的物体 flag_yellow=0 #选择颜色输出标志位 flag_blue=0 #选择颜色输出标志位 flag_red=0 #选择颜色输出标志位 flag_green=0 #选择颜色输出标志位 def sending_data(cx,cy,cz): global uart; data = ustruct.pack("<bbhhh", #格式为俩个字符俩个短整型(2字节) 0x2C, #帧头1 0x12, #帧头2 int(cx), # up sample by 4 #数据1 int(cy), # up sample by 4 #数据2 int(cz), # up sample by 4 #数据1 ) uart.write(data); #必须要传入一个字节数组 while(True): clock.tick() img = sensor.snapshot() # 从感光芯片获得一张图像 img.draw_cross(80, 60) # 在图像中间画十字 blob_yellow = img.find_blobs([threshold_yellow],x_stride=20,y_stride=20,invert=False) blob_blue = img.find_blobs([threshold_blue],x_stride=20,y_stride=20,invert=False) blob_red = img.find_blobs([threshold_red],x_stride=15,y_stride=15,invert=False) blob_green = img.find_blobs([threshold_green],x_stride=15,y_stride=15,invert=False) if blob_yellow: #如果找到了目标颜色 flag_yellow=1 for Y in blob_yellow: #迭代找到的目标颜色区域 img.draw_rectangle(Y[0:4]) # rect #用矩形标记出目标颜色区域 img.draw_cross(Y[5], Y[6]) # cx, cy #在目标颜色区域的中心画十字形标记 img.draw_cross(Y.cx(),Y.cy()) Lm = (Y[2]+Y[3])/2 #b的像素宽,高,平均值 cz = int(K/Lm) #求出距离 img.draw_string(50,60,'x='+str(Y.cx()),color=(0,0,0)) img.draw_string(50,80,'y='+str(Y.cy()),color=(0,0,0)) img.draw_string(50,100,'z='+'%.2f'%cz,color=(0,0,0)) cx = Y.cx() cy = Y.cy() # FH = bytearray([0x2c,0x12,cx,cy,cz]) # uart.write(FH) # time.sleep_ms(1000) sending_data(cx,cy,cz) #坐标发送 time.sleep_ms(1000) #print(cx,cy,cz) lcd.display(img) # 显示图片
-
你说的数据是哪个不对,直接发送数据是对的吗?