openmv脱机运行到一半时会卡死,能帮忙看下什么问题吗?
-
import sensor, image, time, math,pyb,utime from pyb import UART #引入串口通信 from pyb import LED #提示 red_led = LED(1) green_led = LED(2) blue_led = LED(3) global left,middle,right,VAL global color global flag_color #标志变量 left = 0 middle = 0 right = 0 flag_color = 0 red_threshold = (37, 64, 44, 127, -128, 127) green_threshold = (18, 68, -62, -28, -128, 127) blue_threshold = (46, 13, -33, 14, -52, -9) #红、绿、蓝颜色阈值 red_color_code = 1 green_color_code = 2 blue_color_code = 4 black_color_code = 8 sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # 关闭自动增益 sensor.set_auto_whitebal(False) # 关闭白平衡 clock = time.clock() uart = UART(3,9600) #初始化串口通信 def Light(): red_led.on() green_led.on() blue_led.on() if flag_color == 0: flag_color = 1 #二维码读取 while(flag_color == 1): clock.tick() img0 = sensor.snapshot() img0.lens_corr(1.8) for QR in img0.find_qrcodes(): code = QR.payload() img0.draw_rectangle(QR.rect(),color = (255,48,48)) if code == '绿色蓝色': utime.sleep_ms(2000) uart.write('23') uart.write('0') print('23') flag_color = 2 break if code == '绿色红色': utime.sleep_ms(2000) uart.write('21') uart.write('0') print('21') flag_color = 2 break if code == '蓝色绿色': utime.sleep_ms(2000) uart.write('32') uart.write('0') print('32') flag_color = 2 break if code == '蓝色红色': utime.sleep_ms(2000) uart.write('31') uart.write('0') print('31') flag_color = 2 break if code == '红色绿色': utime.sleep_ms(2000) uart.write('12') uart.write('0') print('12') flag_color = 2 break if code == '红色蓝色': utime.sleep_ms(2000) uart.write('13') uart.write('0') print('13') flag_color = 2 break #标志变量为2时 while(flag_color == 2): clock.tick() img = sensor.snapshot() #在三个框里识别物体 img.draw_rectangle((18,80,82,102),color=(0xff,0xff,0xff)) img.draw_rectangle((118,74,100,106),color=(0xff,0xff,0xff)) img.draw_rectangle((238,70,78,102),color=(0xff,0xff,0xff)) #识别左、中、右三个物块 blob_left = img.find_blobs([red_threshold,green_threshold,blue_threshold],area_threshold = 200,merge = True,roi = (18,80,82,102)) blob_middle = img.find_blobs([red_threshold,green_threshold,blue_threshold],area_threshold = 200,merge = True,roi = (118,74,100,106)) blob_right = img.find_blobs([red_threshold,green_threshold,blue_threshold],area_threshold = 200,merge = True,roi = (238,70,78,102)) left = 0 middle = 0 right = 0 #判断左侧物体颜色 if blob_left: for blob in blob_left: x = blob[0] y = blob[1] width = blob[2] height = blob[3] center_x = blob[5] center_y = blob[6] color_code = blob[8] #添加颜色说明 if color_code == red_color_code: img.draw_string(x, y, 'red',color = (0xff,0x00,0x00)) left = 1 elif color_code == green_color_code: img.draw_string(x,y-10,"green",color = (0x00,0xff,0x00)) left = 2 elif color_code == blue_color_code: img.draw_string(x,y-10,"blue",color = (0x00,0x00,0xff)) left = 3 color = color_code img.draw_rectangle(x,y,width,height) img.draw_cross(center_x,center_y) #判断中间物体颜色 if blob_middle: for blob in blob_middle: x = blob[0] y = blob[1] width = blob[2] height = blob[3] center_x = blob[5] center_y = blob[6] color_code = blob[8] #添加颜色说明 if color_code == red_color_code: img.draw_string(x,y-10,"red",color = (0xff,0x00,0x00)) middle = 1 elif color_code == green_color_code: img.draw_string(x,y-10,"green",color = (0x00,0xff,0x00)) middle = 2 elif color_code == blue_color_code: img.draw_string(x,y-10,"blue",color = (0x00,0x00,0xff)) middle = 3 color = color_code img.draw_rectangle(x,y,width,height) img.draw_cross(center_x,center_y) #判断右侧物体颜色 if blob_right: for blob in blob_right: x = blob[0] y = blob[1] width = blob[2] height = blob[3] center_x = blob[5] center_y = blob[6] color_code = blob[8] #添加颜色说明 if color_code == red_color_code: img.draw_string(x,y-10,"red",color = (0xff,0x00,0x00)) right = 1 elif color_code == green_color_code: img.draw_string(x,y-10,"green",color = (0x00,0xff,0x00)) right = 2 elif color_code == blue_color_code: img.draw_string(x,y-10,"blue",color = (0x00,0x00,0xff)) right = 3 color = color_code img.draw_rectangle(x,y,width,height) img.draw_cross(center_x,center_y) if left!=0 and middle != 0 and right != 0 and left != middle and left != right and right != middle: #123 if left == 1 and middle == 2 and right == 3: print("%d%d%d" % (left,middle,right)) uart.write('123') utime.sleep_ms(5000) flag_color =3 #132 if left == 1 and middle == 3 and right == 2: print("%d%d%d" % (left,middle,right)) uart.write('132') utime.sleep_ms(5000) flag_color =3 #213 if left == 2 and middle == 1 and right == 3: print("%d%d%d" % (left,middle,right)) uart.write('213') utime.sleep_ms(5000) flag_color =3 #231 if left == 2 and middle == 3 and right == 1: print("%d%d%d" % (left,middle,right)) uart.write('231') utime.sleep_ms(5000) flag_color =3 #312 if left == 3 and middle == 1 and right == 2: print("%d%d%d" % (left,middle,right)) uart.write('312') utime.sleep_ms(5000) flag_color =3 #321 if left == 3 and middle == 2 and right == 1: print("%d%d%d" % (left,middle,right)) uart.write('321') utime.sleep_ms(5000) flag_color =3 #当标志变量变为3时: while(flag_color == 3): clock.tick() img = sensor.snapshot() #在三个框里识别物体 img.draw_rectangle((18,80,82,102),color=(0x00,0x00,0x00)) img.draw_rectangle((118,74,100,106),color=(0x00,0x00,0x00)) img.draw_rectangle((238,70,78,102),color=(0x00,0x00,0x00)) #识别左、中、右三个物块 blob_left = img.find_blobs([red_threshold,green_threshold,blue_threshold],area_threshold = 200,merge = True,roi = (18,80,82,102)) blob_middle = img.find_blobs([red_threshold,green_threshold,blue_threshold],area_threshold = 200,merge = True,roi = (118,74,100,106)) blob_right = img.find_blobs([red_threshold,green_threshold,blue_threshold],area_threshold = 200,merge = True,roi = (238,70,78,102)) left = 0 middle = 0 right = 0 #判断左侧物体颜色 if blob_left: for blob in blob_left: x = blob[0] y = blob[1] width = blob[2] height = blob[3] center_x = blob[5] center_y = blob[6] color_code = blob[8] #添加颜色说明 if color_code == red_color_code: img.draw_string(x, y, 'red',color = (0xff,0x00,0x00)) left = 1 elif color_code == green_color_code: img.draw_string(x,y-10,"green",color = (0x00,0xff,0x00)) left = 2 elif color_code == blue_color_code: img.draw_string(x,y-10,"blue",color = (0x00,0x00,0xff)) left = 3 color = color_code img.draw_rectangle(x,y,width,height) img.draw_cross(center_x,center_y) #判断中间物体颜色 if blob_middle: for blob in blob_middle: x = blob[0] y = blob[1] width = blob[2] height = blob[3] center_x = blob[5] center_y = blob[6] color_code = blob[8] #添加颜色说明 if color_code == red_color_code: img.draw_string(x,y-10,"red",color = (0xff,0x00,0x00)) middle = 1 elif color_code == green_color_code: img.draw_string(x,y-10,"green",color = (0x00,0xff,0x00)) middle = 2 elif color_code == blue_color_code: img.draw_string(x,y-10,"blue",color = (0x00,0x00,0xff)) middle = 3 color = color_code img.draw_rectangle(x,y,width,height) img.draw_cross(center_x,center_y) #判断右侧物体颜色 if blob_right: for blob in blob_right: x = blob[0] y = blob[1] width = blob[2] height = blob[3] center_x = blob[5] center_y = blob[6] color_code = blob[8] #添加颜色说明 if color_code == red_color_code: img.draw_string(x,y-10,"red",color = (0xff,0x00,0x00)) right = 1 elif color_code == green_color_code: img.draw_string(x,y-10,"green",color = (0x00,0xff,0x00)) right = 2 elif color_code == blue_color_code: img.draw_string(x,y-10,"blue",color = (0x00,0x00,0xff)) right = 3 color = color_code img.draw_rectangle(x,y,width,height) img.draw_cross(center_x,center_y) if left!=0 and middle != 0 and right != 0 and left != middle and left != right and right != middle: #123 if left == 1 and middle == 2 and right == 3: print("%d%d%d" % (left,middle,right)) uart.write('123') flag_color =4 #132 if left == 1 and middle == 3 and right == 2: print("%d%d%d" % (left,middle,right)) uart.write('132') flag_color =4 #213 if left == 2 and middle == 1 and right == 3: print("%d%d%d" % (left,middle,right)) uart.write('213') flag_color =4 #231 if left == 2 and middle == 3 and right == 1: print("%d%d%d" % (left,middle,right)) uart.write('231') flag_color =4 #312 if left == 3 and middle == 1 and right == 2: print("%d%d%d" % (left,middle,right)) uart.write('312') flag_color =4 #321 if left == 3 and middle == 2 and right == 1: print("%d%d%d" % (left,middle,right)) uart.write('321') flag_color =4 #####完成扫描 while(flag_color == 4): green_led.on()
-
color_code定义过但是他会报错,
color_code' isn't defined
而且摄像头非常的黑,换了一个摄像头就是正常亮度,
-
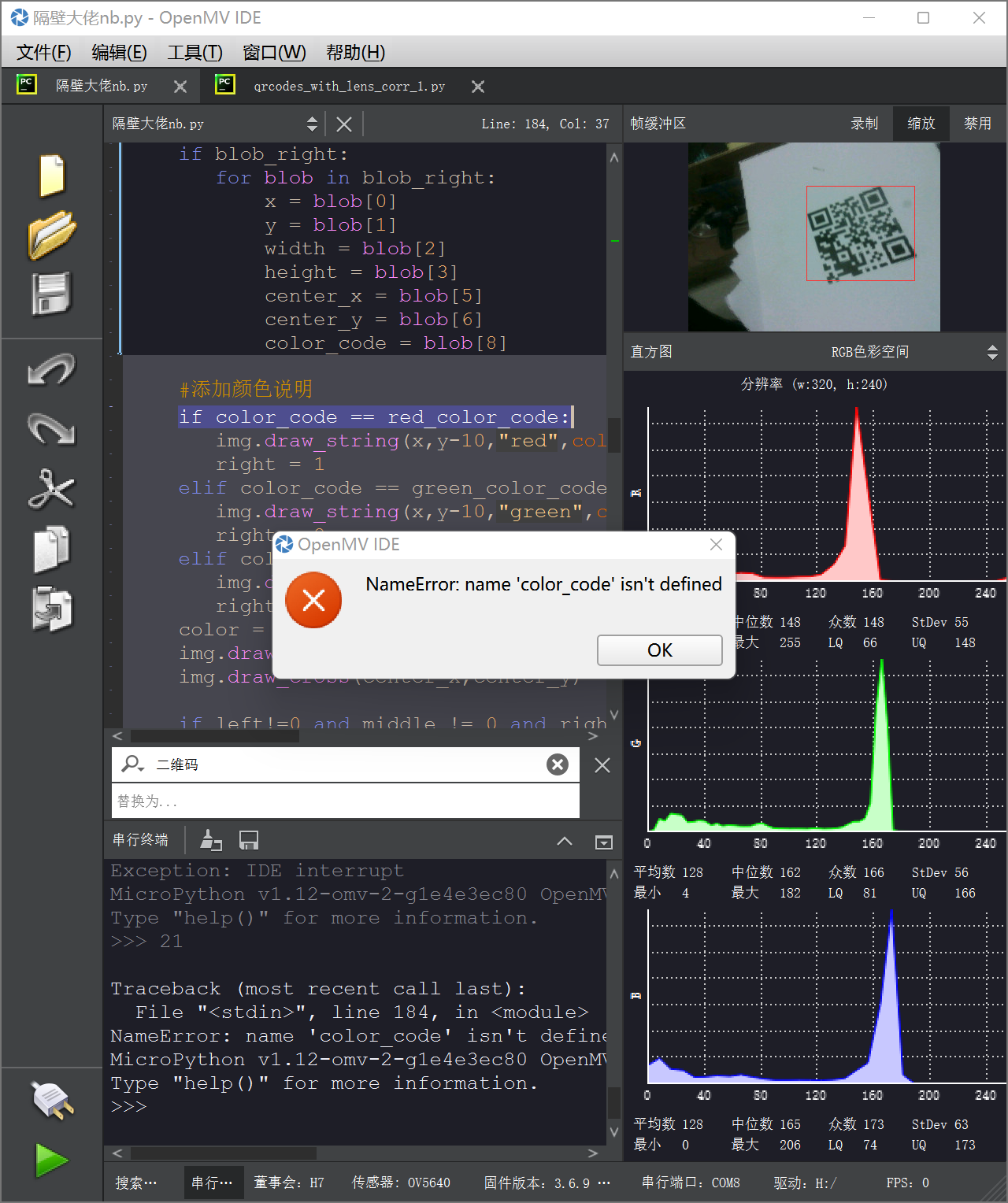
color code 定义过了但是还是会报错
-
就是代码有问题,和脱机没关系。
面条代码太复杂,我不能完全给你重写。
1,
color_code定义过但是他会报错,原因:事实上你没定义过
解决办法:在25行加color_code=02,
你的代码没有死循环,运行到最后就退出了。
-
我已经按照你说的修改了代码,但是还是在脱机运行的时候会卡死,无法脱机运行。
-
@oxu2 你具体的现象是什么,有什么报错,你要重新发你的代码。
“卡死”是什么现象,是连不上电脑,还是OpenMV闪灯。
-
串口有发送数据,但是用串口调试助手看是空的
-
@oxu2 你要重新发你的代码
而且我说了很多遍了,你的代码没有死循环,运行到最后就退出了。
你在最后添加
while True: uart.write("finishd\r\n") time.sleep_ms(100)就可以看到他是不是结束了