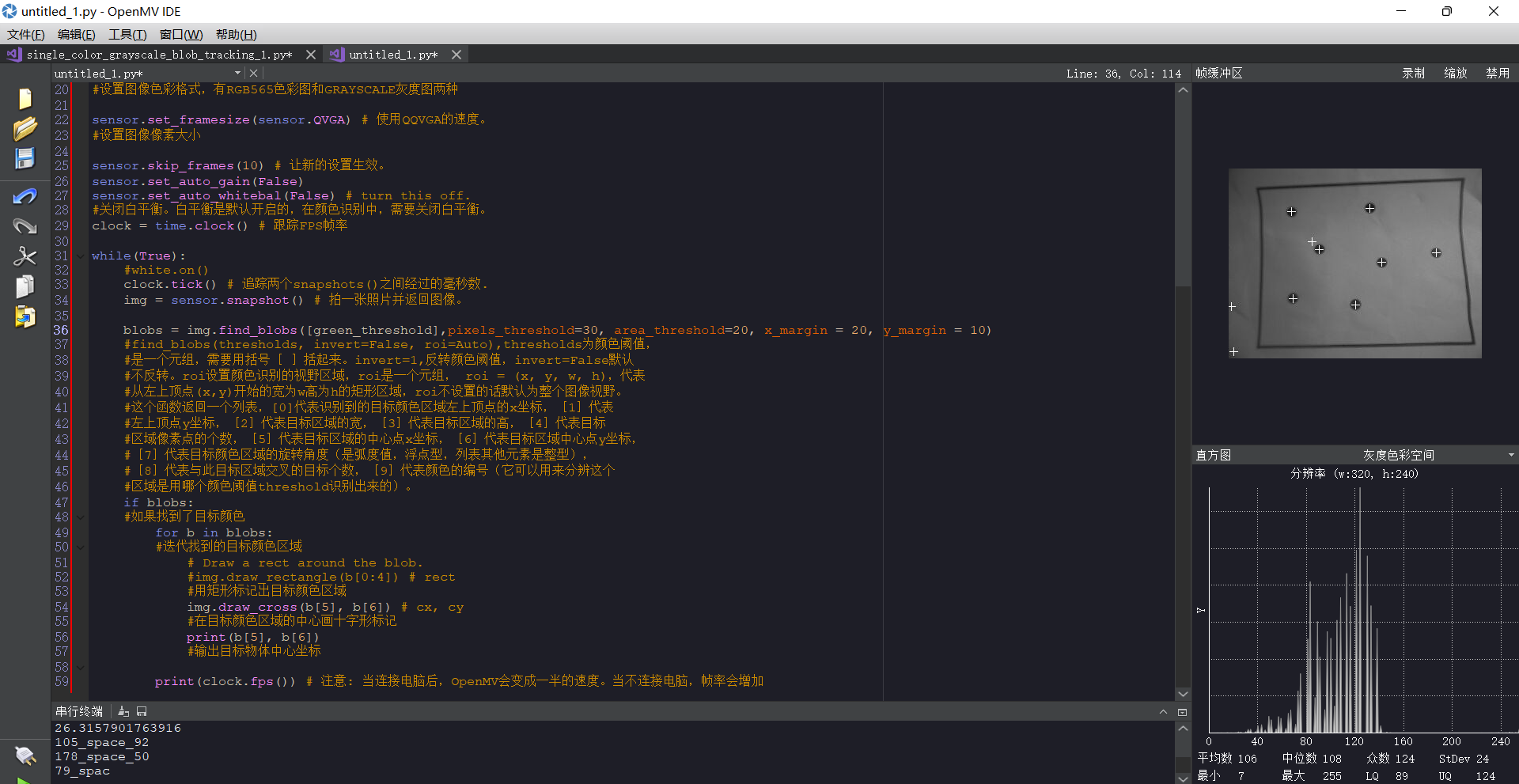
为什么会出现识别符号出现在色块之外的现象
-
-
如果涉及代码,需要报错提示与全部代码文本,请注意不要贴代码图片
-
import sensor, image, time # 为了使色彩追踪效果真的很好,你应该在一个非常受控制的照明环境中。 green_threshold = ( 0, 80, -70, -10, -0, 30) # 设置绿色的阈值,括号里面的数值分别是L A B 的最大值和最小值(minL, maxL, minA, # maxA, minB, maxB),LAB的值在图像左侧三个坐标图中选取。如果是灰度图,则只需 # 设置(min, max)两个数字即可。 # 你可能需要调整上面的阈值来跟踪绿色的东西… # 在Framebuffer中选择一个区域来复制颜色设置。 sensor.reset() # 初始化sensor sensor.set_pixformat(sensor.RGB565) # use RGB565. #设置图像色彩格式,有RGB565色彩图和GRAYSCALE灰度图两种 sensor.set_framesize(sensor.QQVGA) # 使用QQVGA的速度。 #设置图像像素大小 sensor.skip_frames(10) # 让新的设置生效。 sensor.set_auto_whitebal(False) # turn this off. #关闭白平衡。白平衡是默认开启的,在颜色识别中,需要关闭白平衡。 clock = time.clock() # 跟踪FPS帧率 while(True): clock.tick() # 追踪两个snapshots()之间经过的毫秒数. img = sensor.snapshot() # 拍一张照片并返回图像。 blobs = img.find_blobs([green_threshold]) #find_blobs(thresholds, invert=False, roi=Auto),thresholds为颜色阈值, #是一个元组,需要用括号[ ]括起来。invert=1,反转颜色阈值,invert=False默认 #不反转。roi设置颜色识别的视野区域,roi是一个元组, roi = (x, y, w, h),代表 #从左上顶点(x,y)开始的宽为w高为h的矩形区域,roi不设置的话默认为整个图像视野。 #这个函数返回一个列表,[0]代表识别到的目标颜色区域左上顶点的x坐标,[1]代表 #左上顶点y坐标,[2]代表目标区域的宽,[3]代表目标区域的高,[4]代表目标 #区域像素点的个数,[5]代表目标区域的中心点x坐标,[6]代表目标区域中心点y坐标, #[7]代表目标颜色区域的旋转角度(是弧度值,浮点型,列表其他元素是整型), #[8]代表与此目标区域交叉的目标个数,[9]代表颜色的编号(它可以用来分辨这个 #区域是用哪个颜色阈值threshold识别出来的)。 if blobs: #如果找到了目标颜色 for b in blobs: #迭代找到的目标颜色区域 # Draw a rect around the blob. img.draw_rectangle(b[0:4]) # rect #用矩形标记出目标颜色区域 img.draw_cross(b[5], b[6]) # cx, cy #在目标颜色区域的中心画十字形标记 print(b[5], b[6]) #输出目标物体中心坐标 print(clock.fps())就是用了官方的例程,额外加了图上的阈值就出现了误判,怎样减少误判的情况
-
@2nc3 就是用了官方的例程,额外加了图上的阈值就出现了误判,怎样减少误判的情况
-
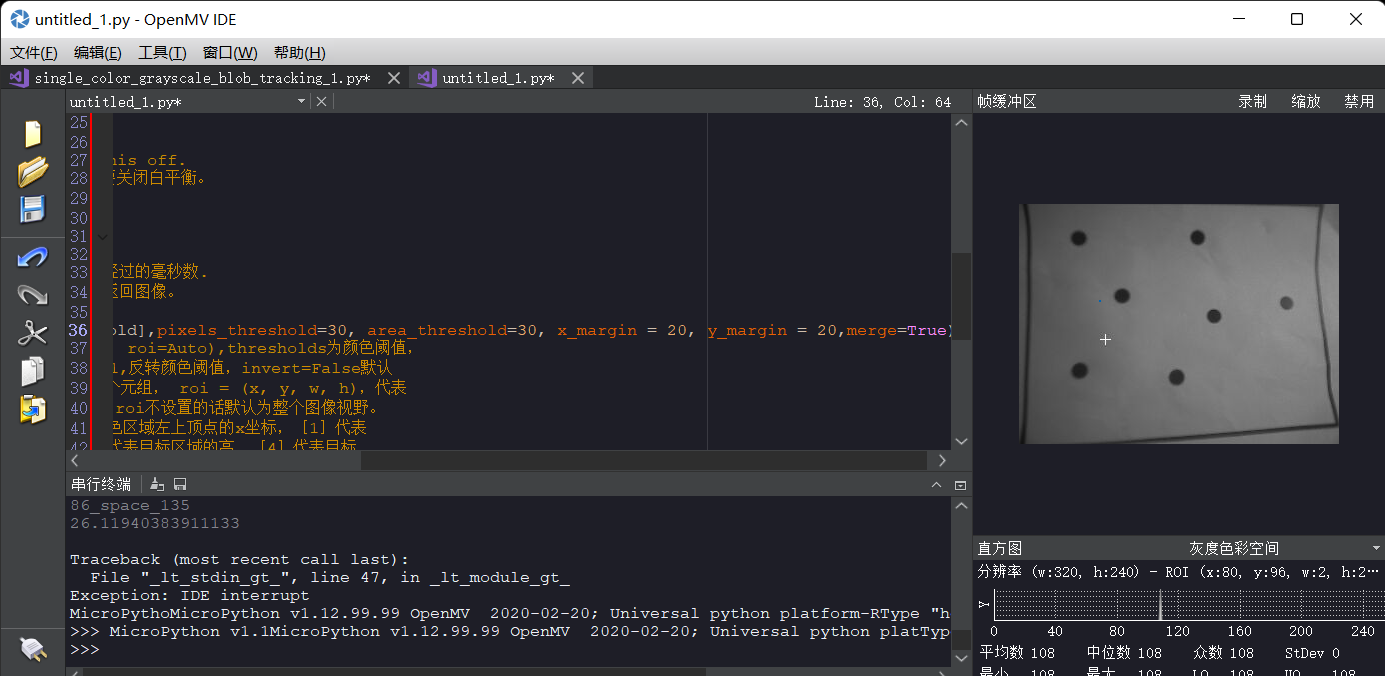
原因:寻找色块是不能找框的。如果你把draw_rectangle打开就能看到。
-
如何使寻找色块的同时不找框呢,调大阈值?
-
如果把黑色边框的width*height应该是比较大的。
所以可以在for循环里过滤掉它。
if blobs: #如果找到了目标颜色 for b in blobs: #迭代找到的目标颜色区域 # Draw a rect around the blob. if b.area() < 50: img.draw_rectangle(b[0:4]) # rect img.draw_cross(b[5], b[6]) # cx, cy print(b[5], b[6]) else: print("忽略它")除了面积,还可以判断一下圆度,密度比这些特征。
https://docs.singtown.com/micropython/zh/latest/openmvcam/library/omv.image.html#blob.roundness