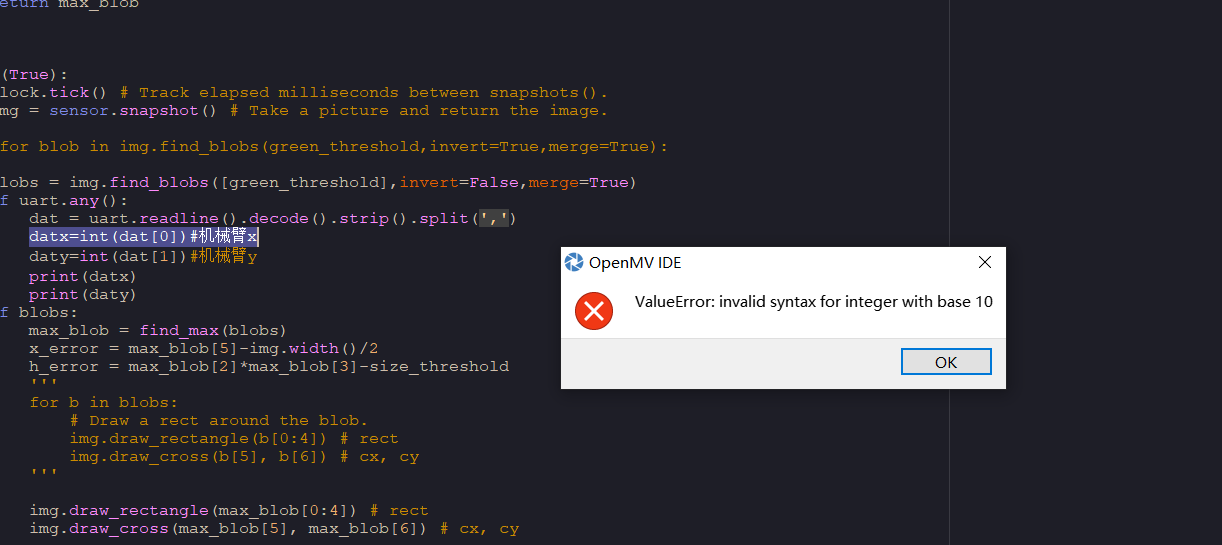
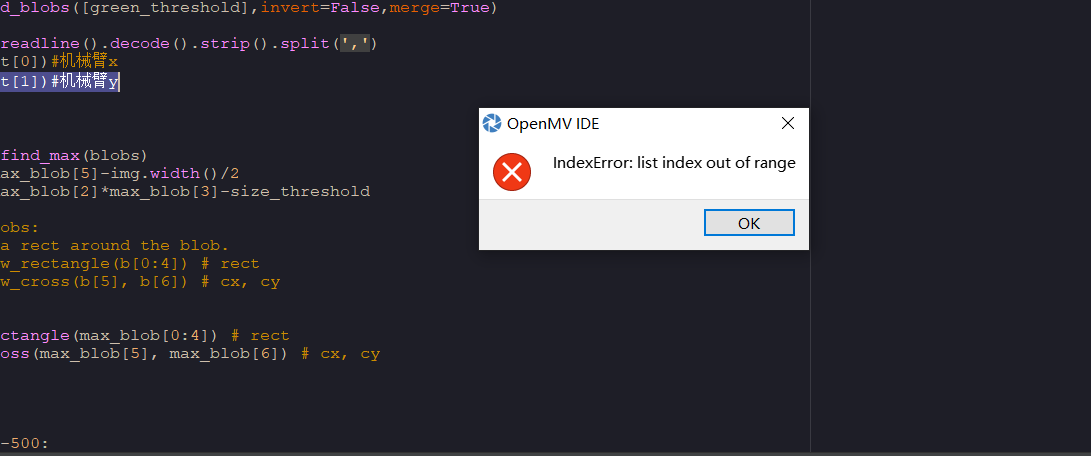
串口 十进制整数的无效语法 和列表索引超出范围
-
-
# Blob Detection Example # # This example shows off how to use the find_blobs function to find color # blobs in the image. This example in particular looks for dark green objects. import sensor, image, time import car from pid import PID from pyb import UART # You may need to tweak the above settings for tracking green things... # Select an area in the Framebuffer to copy the color settings. sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.RGB565) # use RGB565. sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed. sensor.skip_frames(10) # Let new settings take affect. sensor.set_auto_whitebal(False) # turn this off. clock = time.clock() # Tracks FPS. # For color tracking to work really well you should ideally be in a very, very, # very, controlled enviroment where the lighting is constant... green_threshold = (99, 100, 127, 127, 127, 127) size_threshold = 2000 x_pid = PID(p=0.5, i=1, imax=100) h_pid = PID(p=0.05, i=0.1, imax=50) a=0 datx=0 daty=0 uart = UART(3, 115200) def find_max(blobs): max_size=0 for blob in blobs: if blob[2]*blob[3] > max_size: max_blob=blob max_size = blob[2]*blob[3] return max_blob while(True): clock.tick() # Track elapsed milliseconds between snapshots(). img = sensor.snapshot() # Take a picture and return the image. #for blob in img.find_blobs(green_threshold,invert=True,merge=True): blobs = img.find_blobs([green_threshold],invert=False,merge=True) if uart.any(): dat = uart.readline().decode().strip().split(',') datx=int(dat[0])#机械臂x daty=int(dat[1])#机械臂y print(datx) print(daty) if blobs: max_blob = find_max(blobs) x_error = max_blob[5]-img.width()/2 h_error = max_blob[2]*max_blob[3]-size_threshold ''' for b in blobs: # Draw a rect around the blob. img.draw_rectangle(b[0:4]) # rect img.draw_cross(b[5], b[6]) # cx, cy ''' img.draw_rectangle(max_blob[0:4]) # rect img.draw_cross(max_blob[5], max_blob[6]) # cx, cy if h_error<-500: if h_error<-1500: a=1 if h_error>-1700: h_output=(abs(h_error))/100-3 #print("h_output",h_output) if x_error>0: car.run((h_output-2)*10-x_error*2,h_output*10) elif x_error<0: car.run(h_output*10,(h_output-2)*10+x_error*2) else: car.run(h_output*10,h_output*10) # print("h_utput",-h_output-x_output) else: if x_error>0: car.run(100-x_error*2,100) elif x_error<0: car.run(100,100+x_error*2) else: car.run(100,100) else: car.run(0,0) time.sleep(0.001) if a==1: car.run(-99,-99) time.sleep(0.1) a=0 if h_error>8000: if x_error>0: car.run(-40,-20) elif x_error<0: car.run(-20,-40) else: car.run(-40,-40) elif h_error<3000: if x_error>0: car.run(20,40) elif x_error<0: car.run(40,20) else: car.run(40,40) else: if x_error>5: car.run(-30,30) elif x_error<-5: car.run(30,-30) else: car.run(50,-50)
-
你print一下看看data[0]是啥,反正不是数字。