正确连接测距扩展版后运行代码,少部分呢情况下会出现ETIMEDOUT错误?
-
from machine import I2C from vl53l1x import VL53L1X import sensor, image, time ,math from pyb import UART uart = UART(1, 115200) sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking clock = time.clock() i2c = I2C(2) distance = VL53L1X(i2c) x=0 y=0 while(True): clock.tick() img = sensor.snapshot().lens_corr(1.8) for c in img.find_circles(threshold = 3500, x_margin = 10, y_margin = 10, r_margin = 10, r_min = 2, r_max = 100, r_step = 2): area = (c.x()-c.r(), c.y()-c.r(), 2*c.r(), 2*c.r()) #area为识别到的圆的区域,即圆的外接矩形框 statistics = img.get_statistics(roi=area)#像素颜色统计 print(statistics) #(0,100,0,120,0,120)是红色的阈值,所以当区域内的众数(也就是最多的颜色),范围在这个阈值内,就说明是红色的圆。 #l_mode(),a_mode(),b_mode()是L通道,A通道,B通道的众数。 if 0<statistics.l_mode()<100 and 0<statistics.a_mode()<127 and 0<statistics.b_mode()<127:#if the circle is red img.draw_circle(c.x(), c.y(), c.r(), color = (255, 0, 0))#识别到的红色圆形用红色的圆框出来 x = c.x() y = c.y() #uart.write("find\r\n") print("range: mm ", distance.read(),x,y) #distance_head = distance.read()//256 #distance_tail = distance.read()%256 #data = bytearray([0x2C,0x18,x,y,distance_head,distance_tail,0x5B]) #uart.write(data)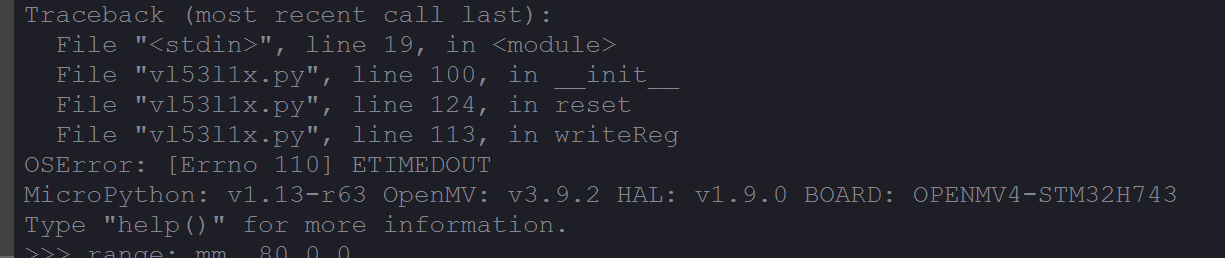
-
引脚插的不紧,松了。