小车+云台 追踪特定的物体 提前保存好特征值无法达到效果
-
我想要实现的功能是:小车+云台 追踪特定的物体
我的方法是:利用特征点识别提前将特征点保存好,然后再用特征值检测来匹配这个特定物体
我提前保存了三张图片,但是识别的时候,我移动物体,也就是换了背景,openmv就识别不到物体了,因此也追踪不了
请问有什么办法可以解决吗?
-
你提供一下具体的图片。
-
我保存了三张这个物体的图

然后运行的时候根本识别不到咧
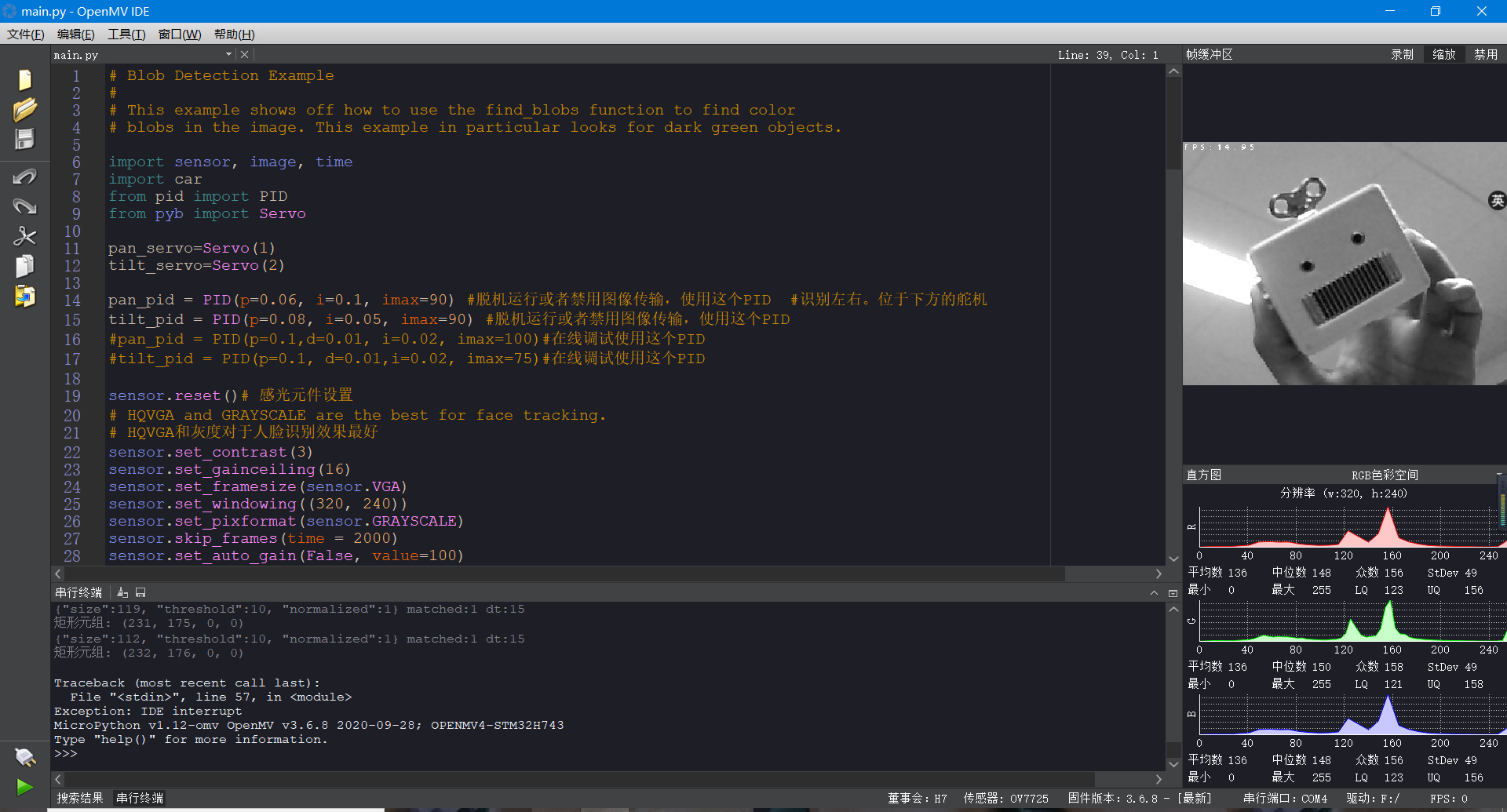
这是代码 拜托帮忙看一下# Blob Detection Example # # This example shows off how to use the find_blobs function to find color # blobs in the image. This example in particular looks for dark green objects. import sensor, image, time import car from pid import PID from pyb import Servo pan_servo=Servo(1) tilt_servo=Servo(2) pan_pid = PID(p=0.06, i=0.1, imax=90) #脱机运行或者禁用图像传输,使用这个PID #识别左右。位于下方的舵机 tilt_pid = PID(p=0.08, i=0.05, imax=90) #脱机运行或者禁用图像传输,使用这个PID #pan_pid = PID(p=0.1,d=0.01, i=0.02, imax=100)#在线调试使用这个PID #tilt_pid = PID(p=0.1, d=0.01,i=0.02, imax=75)#在线调试使用这个PID sensor.reset()# 感光元件设置 # HQVGA and GRAYSCALE are the best for face tracking. # HQVGA和灰度对于人脸识别效果最好 sensor.set_contrast(3) sensor.set_gainceiling(16) sensor.set_framesize(sensor.VGA) sensor.set_windowing((320, 240)) sensor.set_pixformat(sensor.GRAYSCALE) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False, value=100) #画出特征点 def draw_keypoints(img, kpts): if kpts: print(kpts) img.draw_keypoints(kpts) img = sensor.snapshot() time.sleep(2000) #kpts1 = None #运行程序的时候,最开始识别到的物体的特征,将会被保存到kpts1中 #kpts1保存目标物体的特征,可以从文件导入特征,但是不建议这么做。建议检测的时候实时提取特征 kpts1 = image.load_descriptor("/desc.orb") kpts3= image.load_descriptor("/desc1.orb") kpts4= image.load_descriptor("/desc2.orb") clock = time.clock() #如果摄像头检测到的小球的色块面积像素 #点数大于2000的话,就说明我们的小车距 #离我们的小球非常近,大于2000就让小车后退一点, #小于2000就设置openmv去追这个小球 size_threshold = 2000 x_pid = PID(p=0.5, i=1, imax=100) #控制电机的方向(拐角) h_pid = PID(p=0.02, i=0.1, imax=50) #控制小车的速度 def find_max(blobs): #追踪距离最近的小球 max_size=0 for blob in blobs: if blob[4]*blob[5] > max_size: #blob[2]是矩形的宽、blob[3]是矩形的高度 max_blob=blob max_size = blob[4]*blob[5] return max_blob while(True): clock.tick() # Track elapsed milliseconds between snapshots(). img = sensor.snapshot() # 截取一张图片 if (kpts1 == None): kpts1 = img.find_keypoints(max_keypoints=150, threshold=10, scale_factor=1.35) draw_keypoints(img, kpts1) else: kpts2 = img.find_keypoints(max_keypoints=150, threshold=10, normalized=True) #用来检测视野中是否存在特征,将检测到的特征保留在kpts2中 if (kpts2): match = image.match_descriptor(kpts1, kpts2, threshold=85) if (match.count()>10): # If we have at least n "good matches" # Draw bounding rectangle and cross. #在匹配到的目标特征中心画十字和矩形框。 img.draw_rectangle(match.rect()) img.draw_cross(match.cx(), match.cy(), size=10) print(kpts2, "matched:%d dt:%d"%(match.count(), match.theta())) pan_error = match.cx()-img.width()/2 tilt_error = match.cy()-img.height()/2 print("pan_error: ", pan_error) x_output=x_pid.get_pid(match.cx(),1) h_output=h_pid.get_pid(match.cy(),1) #调用pid的函数,get_pid是pid里面的函数,来得到一个最终的结果,来控制小车运动 car.run(-h_output+x_output,-h_output+x_output) pan_output=pan_pid.get_pid(pan_error,1) tilt_output=tilt_pid.get_pid(tilt_error,1) pan_servo.angle(pan_servo.angle()+pan_output) tilt_servo.angle(tilt_servo.angle()+tilt_output) else: car.run(18,-18) #小车在原地以非常慢的速度在旋转 match2 = image.match_descriptor(kpts3, kpts2, threshold=85) if (match2.count()>10): # If we have at least n "good matches" # Draw bounding rectangle and cross. #在匹配到的目标特征中心画十字和矩形框。 img.draw_rectangle(match2.rect()) img.draw_cross(match2.cx(), match2.cy(), size=10) print(kpts2, "matched:%d dt:%d"%(match2.count(), match2.theta())) pan_error = match2.cx()-img.width()/2 tilt_error = match2.cy()-img.height()/2 print("pan_error: ", pan_error) x_output=x_pid.get_pid(match2.cx(),1) h_output=h_pid.get_pid(match2.cy(),1) #调用pid的函数,get_pid是pid里面的函数,来得到一个最终的结果,来控制小车运动 car.run(-h_output+x_output,-h_output+x_output) pan_output=pan_pid.get_pid(pan_error,1) tilt_output=tilt_pid.get_pid(tilt_error,1) pan_servo.angle(pan_servo.angle()+pan_output) tilt_servo.angle(tilt_servo.angle()+tilt_output) else: car.run(18,-18) #小车在原地以非常慢的速度在旋转 match3 = image.match_descriptor(kpts4, kpts2, threshold=85) if (match3.count()>10): # If we have at least n "good matches" # Draw bounding rectangle and cross. #在匹配到的目标特征中心画十字和矩形框。 img.draw_rectangle(match3.rect()) img.draw_cross(match3.cx(), match3.cy(), size=10) print(kpts2, "matched:%d dt:%d"%(match3.count(), match3.theta())) pan_error = match3.cx()-img.width()/2 tilt_error = match3.cy()-img.height()/2 print("pan_error: ", pan_error) x_output=x_pid.get_pid(match3.cx(),1) h_output=h_pid.get_pid(match3.cy(),1) #调用pid的函数,get_pid是pid里面的函数,来得到一个最终的结果,来控制小车运动 car.run(-h_output+x_output,-h_output+x_output) pan_output=pan_pid.get_pid(pan_error,1) tilt_output=tilt_pid.get_pid(tilt_error,1) pan_servo.angle(pan_servo.angle()+pan_output) tilt_servo.angle(tilt_servo.angle()+tilt_output) else: car.run(18,-18) #小车在原地以非常慢的速度在旋转
-
此回复已被删除!
-
https://singtown.com/learn/50021/
先按照视频步骤,测试一下换了背景后是否能识别到。
-
@kidswong999 试过了呢,这些视频我都看了好几遍了的 识别度非常不灵敏 或者就算是识别到 也没办法跟随 所以才想问有没有更好的解决方法
-
没什么好办法。。。