问题:TypeError:unsupported types for _and_:"float,int'该怎么解决?
-
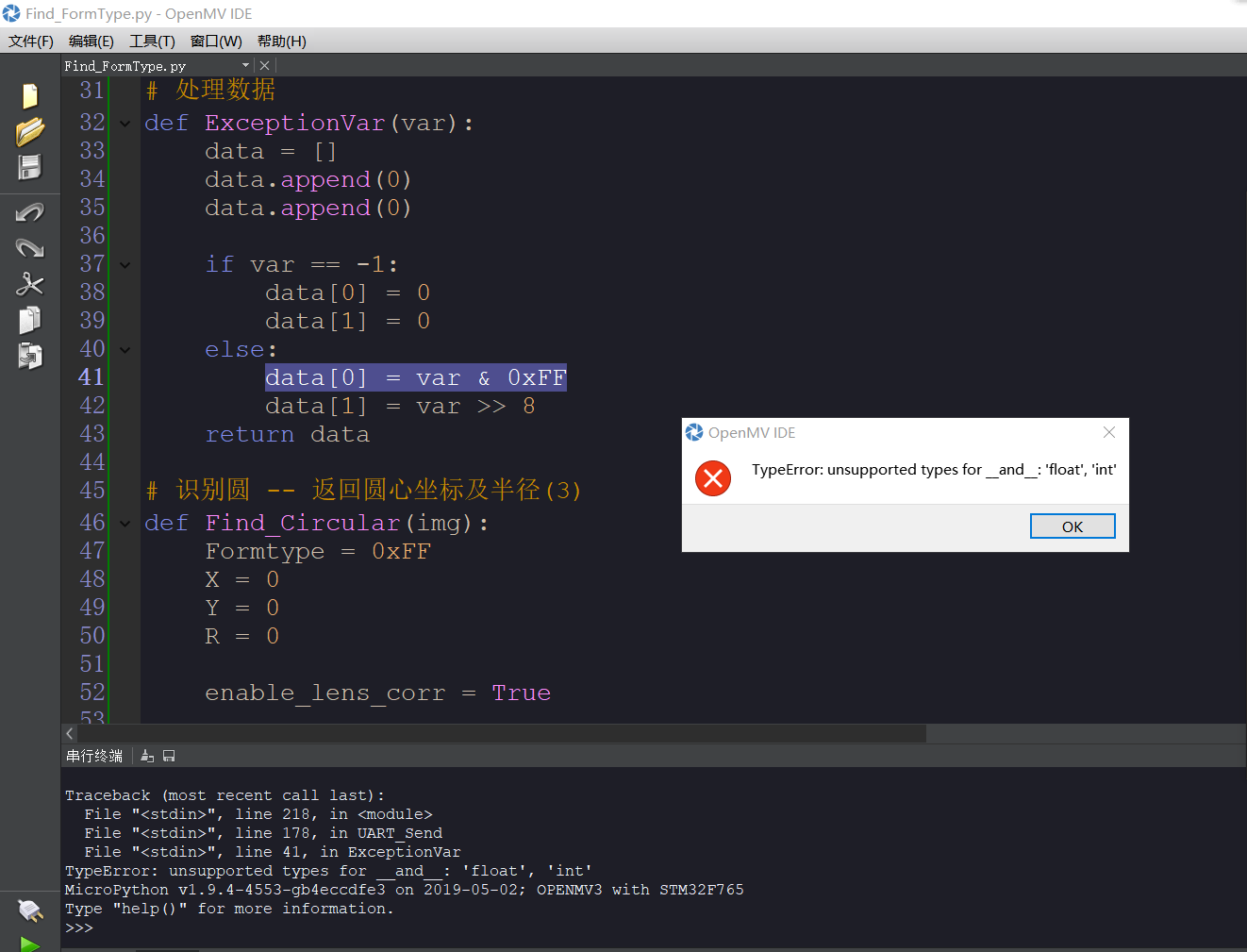
我在写程序时遇到问题TypeError:unsupported types for and:"float,int'该怎么解决?
问题截图:
程序如下:
import sensor, image, time, pyb import math from pyb import UART from pyb import LED Led1 = pyb.LED(3) # 蓝灯 # Ps:pyb.LED(1):Red; pyb.LED(1):Green; pyb.LED(4):IR enable_lens_corr = False # 使能畸变校正标志 # True: 允许畸变校正; False: 禁止畸变校正 # 指示灯 def LED_flicker(): Led1.on() time.sleep(150) Led1.off() time.sleep(150) # 处理数据 def ExceptionVar(var): data = [] data.append(0) data.append(0) if var == -1: data[0] = 0 data[1] = 0 else: data[0] = var & 0xFF data[1] = var >> 8 return data # 识别圆 -- 返回圆心坐标及半径(3) def Find_Circular(img): Formtype = 0xFF X = 0 Y = 0 R = 0 enable_lens_corr = True if enable_lens_corr: img.lens_corr(1.8) # 适用于2.8mm镜头... for c in img.find_circles(threshold = 4000, x_margin = 10, y_margin = 10, r_margin = 10,r_min = 2, r_max = 100, r_step = 2): img.draw_circle(c.x(), c.y(), c.r(), color = (255, 0, 0)) # print(c.x()) Circle_buffer = "[%d,%d,%d]"%(c.x(), c.y(), c.r()) print(Circle_buffer) LED_flicker() X = c.x() Y = c.y() R = c.r() Formtype = 0 return Formtype,X,Y,R # 识别矩形 -- 返回矩形中心点坐标(2) def Find_Rectangle(img): Formtype = 0xFF X = 0 Y = 0 W = 0 H = 0 for rects in img.find_rects():#roi=(0,0,80,120),threshold = 10000 img.draw_rectangle(rects.rect(), color = (255, 0, 0)) for p in rects.corners(): img.draw_circle(p[0], p[1], 5, color = (0, 255, 0)) print(rects) Formtype = 1 X = rects.x() + rects.w()/2 Y = rects.y() + rects.h()/2 # W = rects.w() H = rects.h() rectBuffer = "[%d,%d]"%(X,Y) print(rectBuffer) return Formtype,X,Y,W # 识别直线 -- 返回端点坐标及角度angle(3) def Find_Lines(img): Formtype = 0xFF X = 0 Y = 0 Angle = 0 min_degree = 0 max_degree = 179 if enable_lens_corr: img.lens_corr(1.8) # 适用于2.8mm镜头... for lines in img.find_lines(threshold = 1000, theta_margin = 25, rho_margin = 25): if (min_degree <= lines.theta()) and (lines.theta() <= max_degree): img.draw_line(lines.line(), color = (255, 0, 0)) Formtype = 2 X = lines.x1() Y = lines.y1() Angle = lines.theta() return Formtype,X,Y,Angle # 识别线段 -- 返回端点坐标及角度angle(3) def Find_LineSegment(img): Formtype = 0xFF X = 0 Y = 0 Angle = 0 if enable_lens_corr: img.lens_corr(1.8) # for 2.8mm lens... for linesegment in img.find_line_segments(merge_distance = 0, max_theta_diff = 5): img.draw_line(linesegment.line(), color = (255, 0, 0)) print(linesegment) Formtype = 3 X = linesegment.x1() Y = linesegment.y1() Angle = linesegment.theta() return Formtype,X,Y,Angle # 识别三角形 def Find_Triangle(img): pass # 识别形状(圆,矩形,直线,线段,三角形(线段角度)) def Find_Formtype(img): pass Frame_Cnt = 0 fCnt_tmp = [0,0] # FormType : 所识别的形状 Ps: 0: Cricle -> 圆心坐标 -> 半径 # 1: Rectangle -> 中心坐标 -> # 2: Lines -> 端点坐标(靠近(0,0)) -> 角度 # 3: LineSegment -> 端点坐标 -> 角度angle # FormType_X,FormType_Y : 坐标 # FormType_Other : 其他 def UART_Send(FormType, FormType_X, FormType_Y, FormType_Other): global Frame_Cnt global fCnt_tmp Frame_Head = [170,170] Frame_End = [85,85] fFormType_tmp = [FormType] Frame_Cnt += 1 if Frame_Cnt > 65534 : FrameCnt = 0 fHead = bytes(Frame_Head) fCnt_tmp[0] = Frame_Cnt & 0xFF fCnt_tmp[1] = Frame_Cnt >> 8 fCnt = bytes(fCnt_tmp) fFormType = bytes(fFormType_tmp) fFormType_X = bytes(ExceptionVar(FormType_X)) fFormType_Y = bytes(ExceptionVar(FormType_Y)) fFormType_Other = bytes(ExceptionVar(FormType_Other)) fEnd = bytes(Frame_End) FrameBuffe = fHead + fCnt + fFormType + fFormType_X + fFormType_Y + fFormType_Other + fEnd return FrameBuffe sensor.reset() sensor.set_pixformat(sensor.RGB565) # grayscale is faster sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) clock = time.clock() uart = UART(3, 115200) # i使用给定波特率初始化 # uart.init(115200, bits=8, parity=None, stop=1, timeout_char=1000) # 使用给定参数初始化 while(True): clock.tick() #lens_corr(1.8)畸变矫正 img = sensor.snapshot() # (FormType,X,Y,R) = Find_Circular(img) (FormType,X,Y,W) = Find_Rectangle(img) # (FormType,X,Y,Angle) = Find_Lines(img) # (FormType,X,Y,Angle) = Find_LineSegment(img) if(FormType == 0): print(FormType,X,Y,R) uart.write(UART_Send(FormType,X,Y,R)) elif(FormType == 1): print(FormType,X,Y,W) uart.write(UART_Send(FormType,X,Y,W)) elif(FormType == 2): print(FormType,X,Y,Angle) uart.write(UART_Send(FormType,X,Y,Angle)) elif(FormType == 3): print(FormType,X,Y,Angle) uart.write(UART_Send(FormType,X,Y,Angle)) print("FPS %f" % clock.fps())
-
看上去你的var是一个浮点数,不是整数。
-
此回复已被删除!
-
@kidswong999 应该怎么解决?把浮点型改为整型?
-
@kidswong999 刚刚我测了一下,var是int型