@yuan 所有都是,随便来个第一个
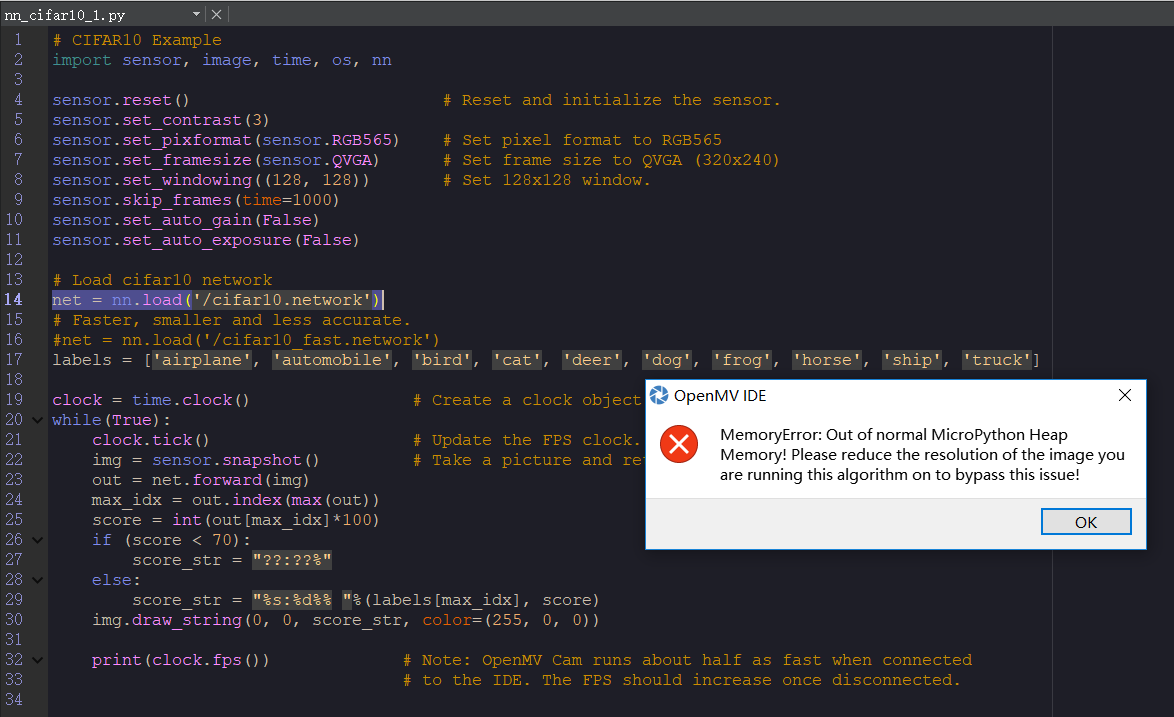
# cifar10例程
import sensor, image, time, os, nn
sensor.reset() # Reset and initialize the sensor.
sensor.set_contrast(3)
sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565
sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240)
sensor.set_windowing((128, 128)) # Set 128x128 window.
sensor.skip_frames(time=1000)
sensor.set_auto_gain(False)
sensor.set_auto_exposure(False)
# 加载cifar10网络。OpenMV3 M7上使用此网络可能会超出内存。
#net = nn.load('/cifar10.network')
# 更快,更小,更准确。建议OpenMV3 M7上使用此网络。
net = nn.load('/cifar10_fast.network')
labels = ['airplane', 'automobile', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck']
clock = time.clock() # Create a clock object to track the FPS.
while(True):
clock.tick() # Update the FPS clock.
img = sensor.snapshot() # Take a picture and return the image.
out = net.forward(img)
max_idx = out.index(max(out))
score = int(out[max_idx]*100)
if (score < 70):
score_str = "??:??%"
else:
score_str = "%s:%d%% "%(labels[max_idx], score)
img.draw_string(0, 0, score_str, color=(255, 0, 0))
print(clock.fps()) # Note: OpenMV Cam runs about half as fast when connected
# to the IDE. The FPS should increase once disconnected.
```上次你就没解决 大佬