如何让黑线始终在小车中央
Y
yecm 发布的帖子
-
快速巡线例程改的小车巡线,小车始终靠线左侧发布在 OpenMV Cam
线性回归巡线例程用不了
# Untitled - By: wfeng - 周六 3月 20 2021 import sensor, image, time, math from pyb import LED import car from pid import PID #调用模块 theta_pid =PID(p=0.4,i=0 GRAYSCALE_THRESHOLD =[(0,64)] #跟踪一条黑线。使用[(0128,255)]跟踪白线。 LED(1).on() LED(2).on() LED(3).on() #开启led补光 ROIS =[#[ROI,weight] (0, 100, 160, 20, 0.7), # 你需要调整应用程序的权重 (0, 50, 160, 20, 0.3), # 取决于你的机器人是如何设置的。 (0, 0, 160, 20, 0.1) ] #设置感兴趣区域 weight_sum=0 for r in ROIS:weight_sum += r[4] #r[4]是roi权重 #相机设置 sensor.reset() #初始化摄像头 sensor.set_pixformat(sensor.GRAYSCALE)#使用灰度图 sensor.set_framesize(sensor.QQVGA) #使用QVGA加速 sensor.skip_frames(time =2000) #让新设置生效 sensor.set_auto_gain(False) sensor.set_auto_whitebal(False) #必须关闭颜色追踪 clock =time.clock() #跟踪FPS while(True): clock.tick() #跟踪快照间的毫秒数() img =sensor.snapshot() #拍照并返回图像 centroid_sum =0 for r in ROIS: blobs =img.find_blobs(GRAYSCALE_THRESHOLD, roi=r[0:4],merge=True) if blobs: largest_blob=max(blobs,key=lambda b: b.pixels()) #找到像素最多的点 img.draw_rectangle(largest_blob.rect()) img.draw_cross(largest_blob.cx(), largest_blob.cy()) #在色块周围画一个矩形 centroid_sum+= largest_blob.cx()*r[4] center_pos =(centroid_sum / weight_sum) #确定线的中心 theta =0 theta= -math.atan((center_pos-80)/60) theta= math.degrees(theta) #将角度转化 print("Turn Angle: %f" % theta) output = theta_pid.get_pid(theta,1) car.run(50+int(output), 50-int(output)) print(clock.fps) -
阈值调整好多次了但是绿色线性回归的线一次也没 出现过发布在 OpenMV Cam
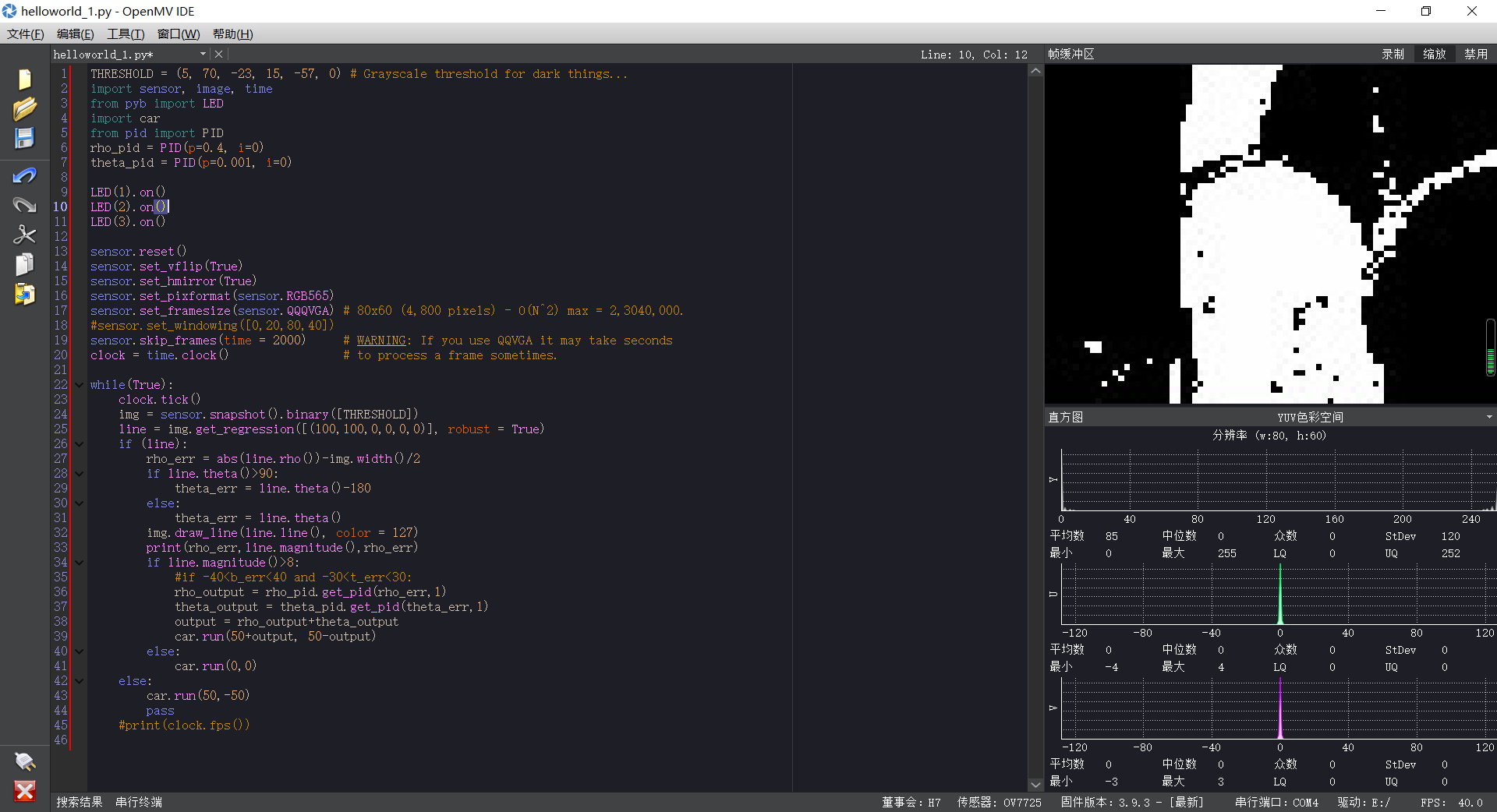
THRESHOLD = (5, 70, -23, 15, -57, 0) # Grayscale threshold for dark things... import sensor, image, time from pyb import LED import car from pid import PID rho_pid = PID(p=0.4, i=0) theta_pid = PID(p=0.001, i=0) LED(1).on() LED(2).on() LED(3).on() sensor.reset() sensor.set_vflip(True) sensor.set_hmirror(True) sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQQVGA) # 80x60 (4,800 pixels) - O(N^2) max = 2,3040,000. #sensor.set_windowing([0,20,80,40]) sensor.skip_frames(time = 2000) # WARNING: If you use QQVGA it may take seconds clock = time.clock() # to process a frame sometimes. while(True): clock.tick() img = sensor.snapshot().binary([THRESHOLD]) line = img.get_regression([(100,100,0,0,0,0)], robust = True) if (line): rho_err = abs(line.rho())-img.width()/2 if line.theta()>90: theta_err = line.theta()-180 else: theta_err = line.theta() img.draw_line(line.line(), color = 127) print(rho_err,line.magnitude(),rho_err) if line.magnitude()>8: #if -40<b_err<40 and -30<t_err<30: rho_output = rho_pid.get_pid(rho_err,1) theta_output = theta_pid.get_pid(theta_err,1) output = rho_output+theta_output car.run(50+output, 50-output) else: car.run(0,0) else: car.run(50,-50) pass #print(clock.fps())