y1gt
@y1gt
0
声望
4
楼层
561
资料浏览
0
粉丝
0
关注
y1gt 发布的帖子
-
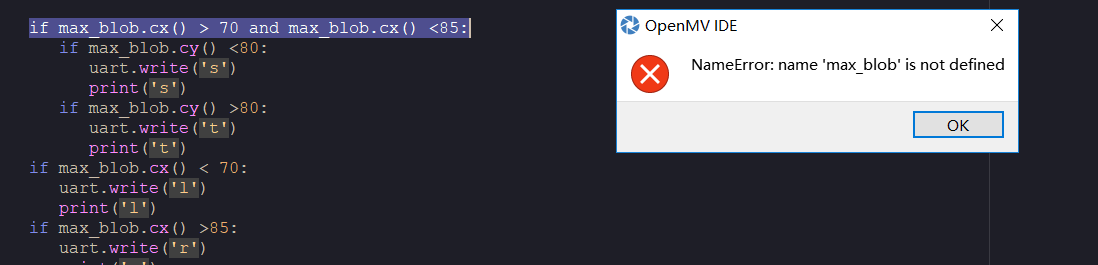
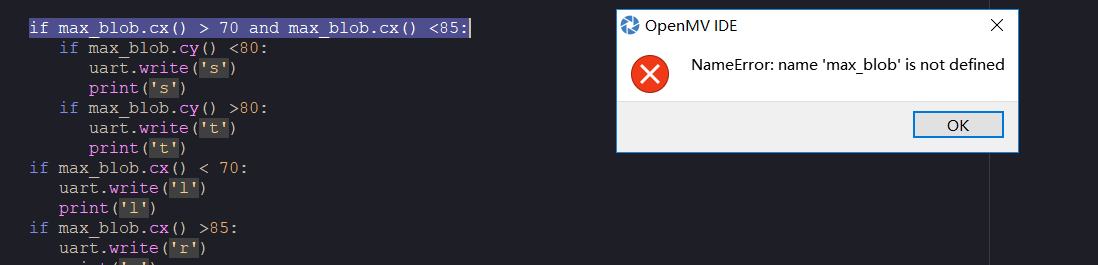
找不到目标就报错,找的到目标就可以正常运行???发布在 OpenMV Cam
import sensor, image, time from pyb import UART import json # For color tracking to work really well you should ideally be in a very, very, # very, controlled enviroment where the lighting is constant... yellow_threshold = (79, 43, -38, 73, 29, 102) # You may need to tweak the above settings for tracking green things... # Select an area in the Framebuffer to copy the color settings. sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.RGB565) # use RGB565. sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed. sensor.skip_frames(10) # Let new settings take affect. sensor.set_auto_whitebal(False) # turn this off. clock = time.clock() # Tracks FPS. uart = UART(3, 115200) def find_max(blobs): max_size=0 for blob in blobs: if blob.pixels() > max_size: max_blob=blob max_size = blob.pixels() return max_blob while(True): img = sensor.snapshot() # Take a picture and return the image. blobs = img.find_blobs([yellow_threshold]) if blobs: max_blob=find_max(blobs) #print('sum :', len(blobs)) img.draw_rectangle(max_blob.rect()) img.draw_cross(max_blob.cx(), max_blob.cy()) output_str="[%d,%d]" % (max_blob.cx(),max_blob.cy()) #方式1 #output_str=json.dumps([max_blob.cx(),max_blob.cy()]) #方式2 #print('you send:',output_str) #uart.write(output_str+'\r\n') else: print('not found!') if max_blob.cx() > 70 and max_blob.cx() <85: if max_blob.cy() <80: uart.write('s') print('s') if max_blob.cy() >80: uart.write('t') print('t') if max_blob.cx() < 70: uart.write('l') print('l') if max_blob.cx() >85: uart.write('r') print('r')