FOMO训练神经网络目标检测实际道路环境交通标志的源代码有无网址分享一下?
X
xktz
@xktz
0
声望
4
楼层
98
资料浏览
0
粉丝
0
关注
xktz 发布的帖子
-
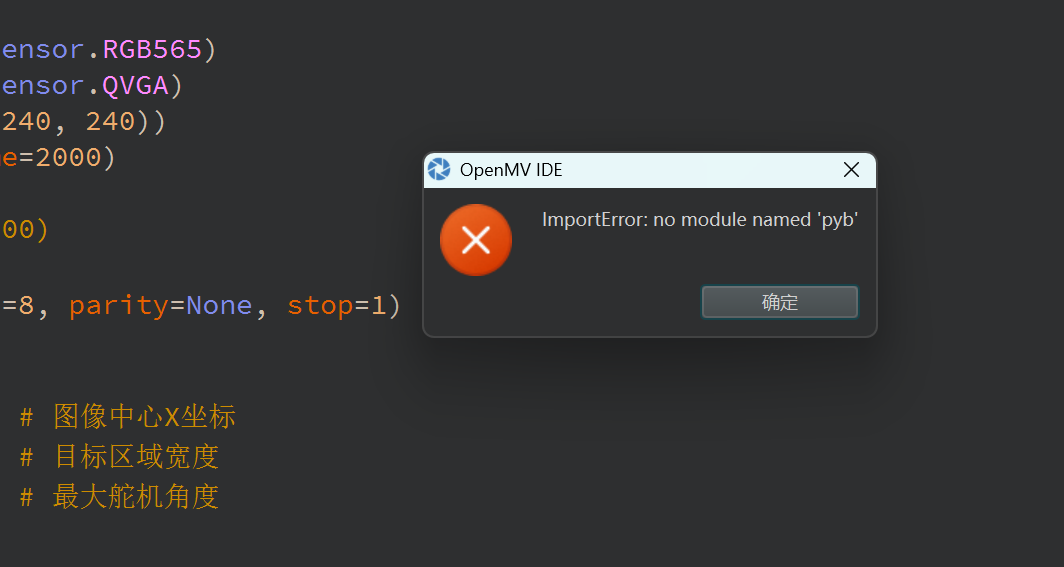
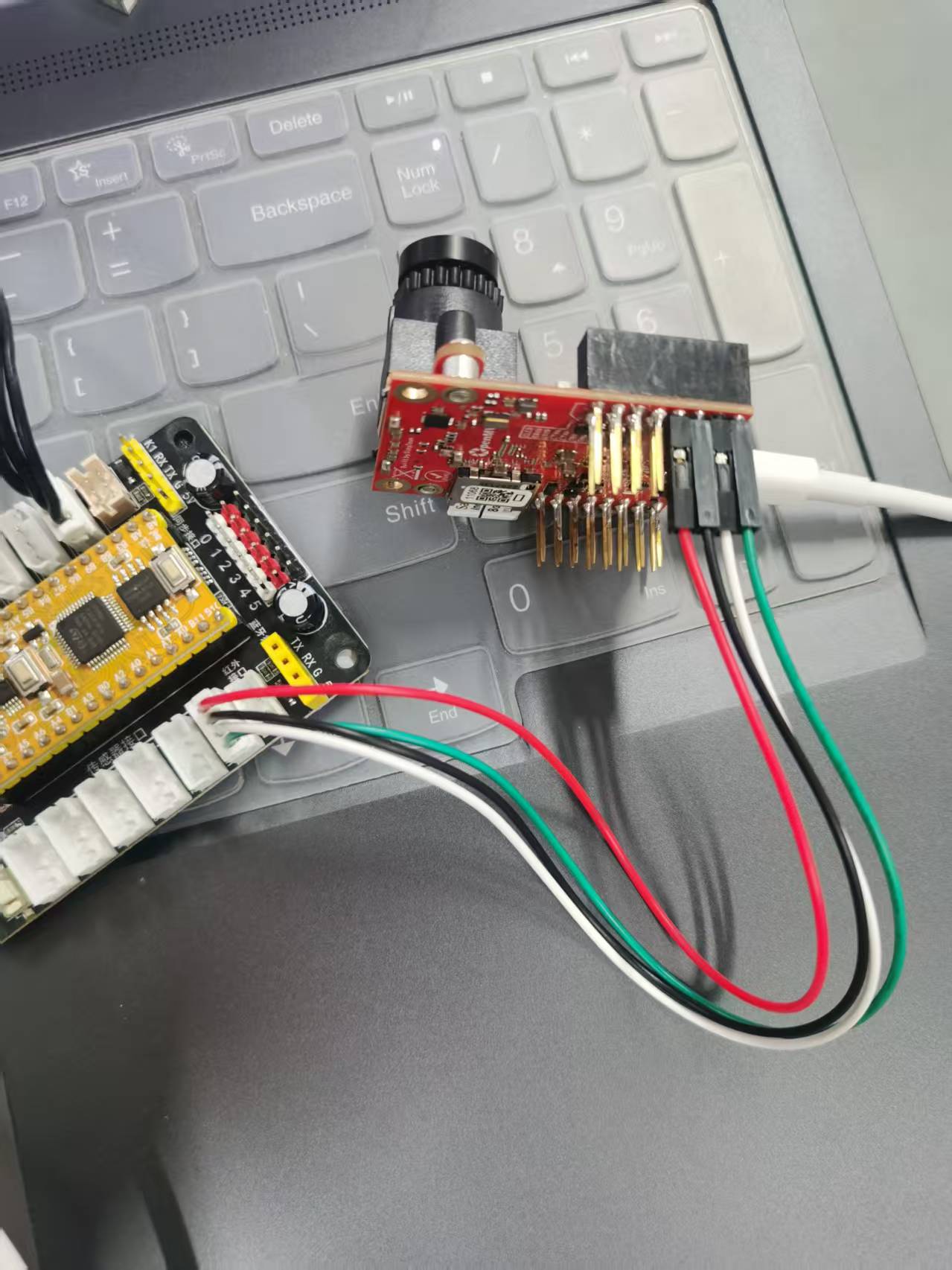
open MV与STM32控制板连接进行UART串口通讯,但是IDE中运行报错没有pyb模块是什么原因?发布在 OpenMV Cam
# OpenMV Object Tracking with UART Communication to STM32 (保持目标检测显示不变) # # This work is licensed under the MIT license. # Copyright (c) 2013-2024 OpenMV LLC. All rights reserved. import sensor, image, time, ml, math, uos, gc from pyb import UART import pyb # 初始化摄像头 sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.set_windowing((240, 240)) sensor.skip_frames(time=2000) # 初始化UART (波特率115200) uart = UART(3, 115200) uart.init(115200, bits=8, parity=None, stop=1) # 目标区域设置 TARGET_CENTER_X = 120 # 图像中心X坐标 TARGET_WIDTH = 20 # 目标区域宽度 MAX_SERVO_ANGLE = 45 # 最大舵机角度 # 数据包格式定义 HEADER = 0xAA # 数据包头 FOOTER = 0x55 # 数据包尾 # 加载模型和标签 (保持不变) net = None labels = None min_confidence = 0.5 try: net = ml.Model("trained.tflite", load_to_fb=uos.stat('trained.tflite')[6] > (gc.mem_free() - (64*1024))) except Exception as e: raise Exception('Failed to load model: ' + str(e)) try: labels = [line.rstrip('\n') for line in open("labels.txt")] except Exception as e: raise Exception('Failed to load labels: ' + str(e)) # 颜色定义 colors = [ (255, 0, 0), (0, 255, 0), (255, 255, 0), (0, 0, 255), (255, 0, 255), (0, 255, 255), (255, 255, 255) ] threshold_list = [(math.ceil(min_confidence * 255), 255)] # 后处理函数 def fomo_post_process(model, inputs, outputs): ob, oh, ow, oc = model.output_shape[0] x_scale = inputs[0].roi[2] / ow y_scale = inputs[0].roi[3] / oh scale = min(x_scale, y_scale) x_offset = ((inputs[0].roi[2] - (ow * scale)) / 2) + inputs[0].roi[0] y_offset = ((inputs[0].roi[3] - (ow * scale)) / 2) + inputs[0].roi[1] l = [[] for i in range(oc)] for i in range(oc): img = image.Image(outputs[0][0, :, :, i] * 255) blobs = img.find_blobs(threshold_list, x_stride=1, y_stride=1, area_threshold=1, pixels_threshold=1) for b in blobs: rect = b.rect() x, y, w, h = rect score = img.get_statistics(thresholds=threshold_list, roi=rect).l_mean() / 255.0 x = int((x * scale) + x_offset) y = int((y * scale) + y_offset) w = int(w * scale) h = int(h * scale) l[i].append((x, y, w, h, score)) return l def send_angle_to_stm32(angle): """发送角度数据给STM32 (二进制协议)""" angle_int = int(angle * 100) # 转换为0.01度单位 data = bytearray([ HEADER, (angle_int >> 8) & 0xFF, # 角度高字节 angle_int & 0xFF, # 角度低字节 FOOTER ]) uart.write(data) # print("Sent:AA %02X %02X 55 (Angle=%.2f°)" % (data[1],data[2],angle)) def calculate_servo_angle(target_x): """计算舵机角度""" angle = (target_x - TARGET_CENTER_X) * (MAX_SERVO_ANGLE / TARGET_CENTER_X) angle = max(-MAX_SERVO_ANGLE, min(MAX_SERVO_ANGLE, angle)) print("Servo angle requireed:{:.2f}".format(angle)) return angle clock = time.clock() while True: clock.tick() img = sensor.snapshot() # 绘制目标区域 img.draw_rectangle((TARGET_CENTER_X-TARGET_WIDTH//2, 0, TARGET_WIDTH, img.height()), color=(0, 255, 0)) detected_objects = [] # 目标检测逻辑 for i, detection_list in enumerate(net.predict([img], callback=fomo_post_process)): if i == 0 or len(detection_list) == 0: continue print(f"----- {labels[i]} -----") for x, y, w, h, score in detection_list: center_x = math.floor(x + w/2) center_y = math.floor(y + h/2) detected_objects.append((center_x, center_y, score)) # 绘制逻辑 img.draw_circle((center_x, center_y, 12), color=colors[i]) img.draw_string(x, y-10, f"{score:.2f°}", color=colors[i]) # 如果有检测到目标,计算平均位置 if detected_objects: # 加权平均计算 total_weight = sum(score for _, _, score in detected_objects) avg_x = sum(x*score for x, _, score in detected_objects) / total_weight # 计算角度并打印 angle = calculate_servo_angle(avg_x) # 计算角度并发送给STM32 angle = calculate_servo_angle(avg_x) send_angle_to_stm32(angle) # # 模拟目标位置(中心右侧30像素) # test_x = TARGET_CENTER_X + 30 # test_angle = (test_x - TARGET_CENTER_X) * (MAX_SERVO_ANGLE / TARGET_CENTER_X) # # 发送虚拟数据 # send_angle_to_stm32(test_angle) # # 保持可视化(可选) # img.draw_cross(int(test_x), 120, color=(255,0,0), size=20) # img.draw_string(10, 10, "调试模式: Angle=%.1f°" % test_angle) # time.sleep_ms(100) # 控制输出频率 img.draw_cross(int(avg_x), color=(255, 0, 0), size=20) img.draw_string(10, 10, f"Target: {int(avg_x)}", color=(255, 255, 255)) img.draw_string(10, 25, f"Angle: {angle:.1f}°", color=(255, 255, 255)) print(f"FPS: {clock.fps():.1f}\n")