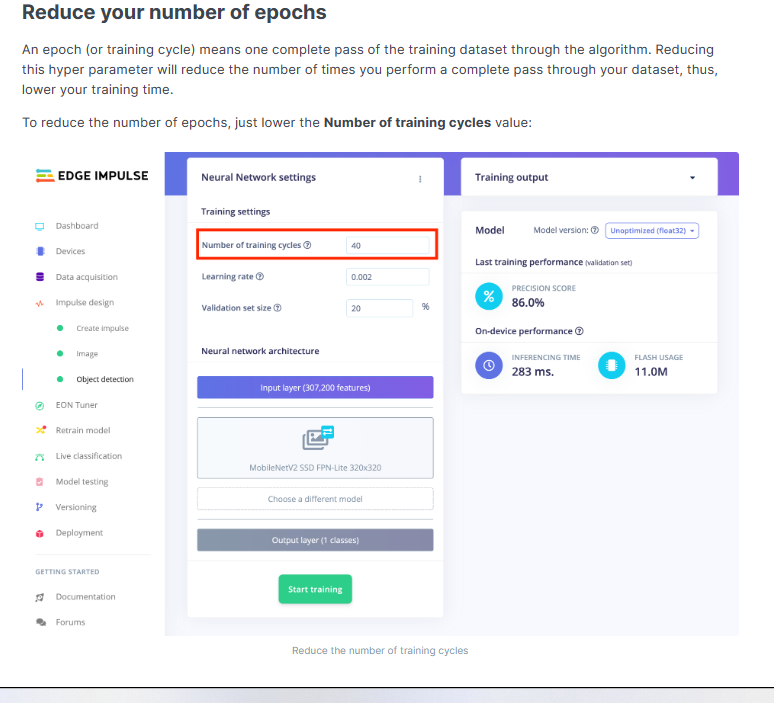
只能训练20轮,效果会不会很差
X
xhk5
@xhk5
-1
声望
22
楼层
759
资料浏览
0
粉丝
1
关注
xhk5 发布的帖子
-
RE: 请问大佬,openmv在电脑上识别挺好的,但是连到工控机上,与别的硬件一起运行就效果就差了发布在 OpenMV Cam
@kidswong999 就是openmv插电脑上识别效果挺好的,但是把openmv连到工控机上,识别效果就不行了
-
RE: 请问大佬,openmv在电脑上识别挺好的,但是连到工控机上,与别的硬件一起运行就效果就差了发布在 OpenMV Cam
@xhk5 神经网络识别的时候也是和在edge implase上label的时候一样去掉图像两边的吗
-
大佬,想问一下怎么在代码层面提高物品识别的精度啊,硬件这边神经网络样例拍了一千多个了。发布在 OpenMV Cam
import sensor, image, time, os, tf, math, uos, gc,pyb
from pyb import UART
from pyb import LED
red_led = LED(1)
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.set_windowing((240, 240))
sensor.skip_frames(time=2000)
uart = UART(3, 9600)
net = None
labels = None
min_confidence = 0.92
try:
net = tf.load("trained.tflite", load_to_fb=uos.stat('trained.tflite')[6] > (gc.mem_free() - (64*1024)))
except Exception as e:
raise Exception('Failed to load "trained.tflite", did you copy the .tflite and labels.txt file onto the mass-storage device? (' + str(e) + ')')
try:
labels = [line.rstrip('\n') for line in open("labels.txt")]
except Exception as e:
raise Exception('Failed to load "labels.txt", did you copy the .tflite and labels.txt file onto the mass-storage device? (' + str(e) + ')')
colors = [
(255, 0, 0),
( 0, 255, 0),
(255, 255, 0),
( 0, 0, 255),
(255, 0, 255),
( 0, 255, 255),
(255, 255, 255),
]
r=0
a=0
count=0
b=0
t=0
flag=0
A=C=D=E=H=I=J=K=L=M=N=O=0
clock = time.clock()
while(True):
img = sensor.snapshot()
if uart.any():
red_led.on()
time.sleep_ms(500)
red_led.off()
A=C=D=E=H=I=J=K=L=M=N=O=0
start = pyb.millis()
count=0
m=uart.read(1).decode()
if m!='o':
a=int(m)while( count <=6 ): detected = True img = sensor.snapshot() if pyb.millis() - start>5000: uart.write("d") count=7 for i, detection_list in enumerate(net.detect(img, thresholds=[(math.ceil(min_confidence * 255), 255)])): if (i == 0): continue if (len(detection_list) == 0): continue print("********** %s **********" % labels[i]) for d in detection_list: [x, y, w, h] = d.rect() center_x = math.floor(x + (w / 2)) center_y = math.floor(y + (h / 2)) print('x %d\ty %d' % (center_x, center_y)) if center_y>100: if labels[i]=="旺仔" : if center_x<=60: A=A+1 elif center_x>60 and center_x<=165: C=C+1 else: D=D+1 if labels[i]=="王老吉" : if center_x<=60: E=E+1 elif center_x>60 and center_x<=165: H=H+1 else: I=I+1 if labels[i]=="雪花" : if center_x<=60: J=J+1 elif center_x>60 and center_x<=165: K=K+1 else: L=L+1 if labels[i]=="AD" : if center_x<=60: M=M+1 elif center_x>60 and center_x<=165: N=N+1 else: O=O+1 count=count+1 #if detected: # flag=1 #if flag==1: # uart.write("d") # flag=0 list=[A,C,D,E,H,I,J,K,L,M,N,O] Z=max(list) if Z<=3 and Z>0 : uart.write("d") A=C=D=E=H=I=J=K=L=M=N=O=0 elif Z>3: if A==Z : uart.write("A") if C==Z : uart.write("C") if D==Z : uart.write("D") if E==Z : uart.write("E") if H==Z : uart.write("H") if I==Z : uart.write("I") if J==Z : uart.write("J") if K==Z : uart.write("K") if L==Z : uart.write("L") if M==Z : uart.write("M") if N==Z : uart.write("N") if O==Z : uart.write("O") A=C=D=E=H=I=J=K=L=M=N=O=0 -
请问大佬,如果没有识别到给定物体,怎么让他输出”null“。还有就是openmv怎么实现多线程同时进行两个while循环发布在 OpenMV Cam
# Edge Impulse - OpenMV Object Detection Example import sensor, image, time, os, tf, math, uos, gc sensor.reset() # Reset and initialize the sensor. sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE) sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240) sensor.set_windowing((240, 240)) # Set 240x240 window. sensor.skip_frames(time=2000) # Let the camera adjust. net = None labels = None min_confidence = 0.5 try: # load the model, alloc the model file on the heap if we have at least 64K free after loading net = tf.load("trained.tflite", load_to_fb=uos.stat('trained.tflite')[6] > (gc.mem_free() - (64*1024))) except Exception as e: raise Exception('Failed to load "trained.tflite", did you copy the .tflite and labels.txt file onto the mass-storage device? (' + str(e) + ')') try: labels = [line.rstrip('\n') for line in open("labels.txt")] except Exception as e: raise Exception('Failed to load "labels.txt", did you copy the .tflite and labels.txt file onto the mass-storage device? (' + str(e) + ')') colors = [ # Add more colors if you are detecting more than 7 types of classes at once. (255, 0, 0), ( 0, 255, 0), (255, 255, 0), ( 0, 0, 255), (255, 0, 255), ( 0, 255, 255), (255, 255, 255), ] clock = time.clock() while(True): clock.tick() img = sensor.snapshot() # detect() returns all objects found in the image (splitted out per class already) # we skip class index 0, as that is the background, and then draw circles of the center # of our objects for i, detection_list in enumerate(net.detect(img, thresholds=[(math.ceil(min_confidence * 255), 255)])): if (i == 0): continue # background class if (len(detection_list) == 0): continue # no detections for this class? print("********** %s **********" % labels[i]) for d in detection_list: [x, y, w, h] = d.rect() center_x = math.floor(x + (w / 2)) center_y = math.floor(y + (h / 2)) print('x %d\ty %d' % (center_x, center_y)) img.draw_circle((center_x, center_y, 12), color=colors[i], thickness=2) print(clock.fps(), "fps", end="\n\n") -
RE: 想问下大佬,openmv能做到在三样物品中识别出不同的一个物品吗?发布在 OpenMV Cam
@kidswong999 但是神经网络不是要预先录入已知的物品的嘛,我说的这个三个物品是未知的
 这个方法现在是不能用了嘛
这个方法现在是不能用了嘛