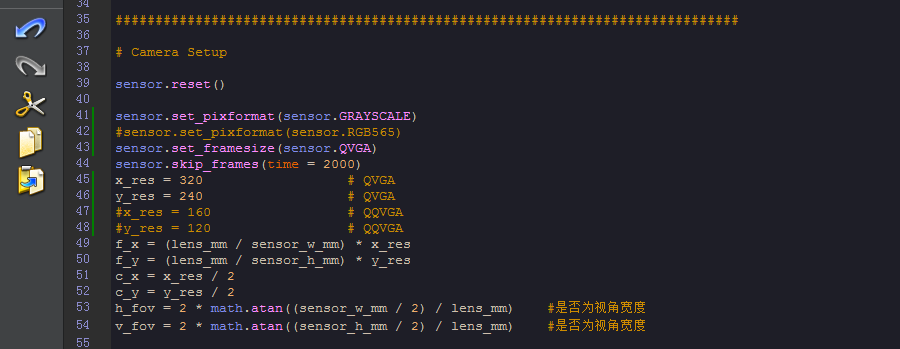
这是我改完分辨率sensor.set_framesize(sensor.QVGA)为QVGA后的部分程序。
出现错误提示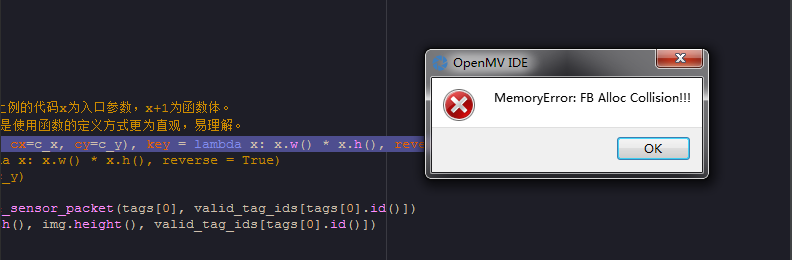
程序在 tags = sorted(img.find_apriltags(fx=f_x, fy=f_y, cx=c_x, cy=c_y), key = lambda x: x.w() * x.h(), reverse = True)这里报错。
望帮找找原因,谢谢。
X
xh2v 发布的帖子
-
RE: 关于openmv板子apriltag识别距离问题发布在 OpenMV Cam
-
RE: 关于openmv板子apriltag识别距离问题发布在 OpenMV Cam
您好,调高分辨率是不是修改sensor.set_framesize(sensor.QQVGA)
为sensor.set_framesize(sensor.QVGA)就可以了呢?但是这么改 tags = sorted(img.find_apriltags(fx=f_x, fy=f_y, cx=c_x, cy=c_y), key = lambda x: x.w() * x.h(), reverse = True)这句开始报错。 -
关于openmv板子apriltag识别距离问题发布在 OpenMV Cam
您好,我这里实验发现openmv 镜头焦距为2.8mm的板子识别APTILTAG 的距离很短,只有1米到2米,这个正常 么?
-
有关基于APRILTAG无人机定点降落程序的疑问发布在 OpenMV Cam
例程讲解18-MAVLink->mavlink_apriltags_landing_target无人机通过mavlink实现apriltag定点降落 一文历程中 这一行((tag.cx() / w) - 0.5) * h_fov代码计算的是什么角度值呢?谢谢。第二个问题是为什么要减去0.5呢?