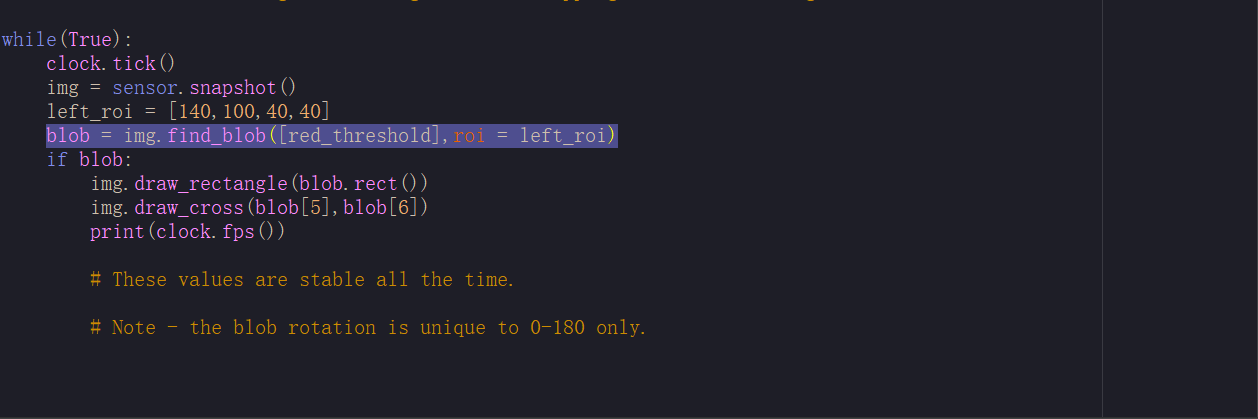
我想要用openmv在抓到一个物体后计算出物体与openmv所拍摄到的画面的底部中心点位置的一个夹角的角度值
求助求帮忙,

W
wt4q
@wt4q
1
声望
9
楼层
980
资料浏览
0
粉丝
0
关注
wt4q 发布的帖子
-
如何计算openmv所捕捉到的物体与openmv的角度值发布在 OpenMV Cam
-
OPENMV如何通过串口视频流传输到开发板上发布在 OpenMV Cam
我想让OPENmv通过它的串口将他拍摄到的视频流通过串口传输到我的开发板上,然后我想让我的开发板通过我自己的ESP8266将数据传输到我的遥控器上的ESP8266,通过我遥控器上的开发板读取接收到的视频流,显示到我遥控器上的TETLCD上,这要怎么写求指教。 这太难了

-
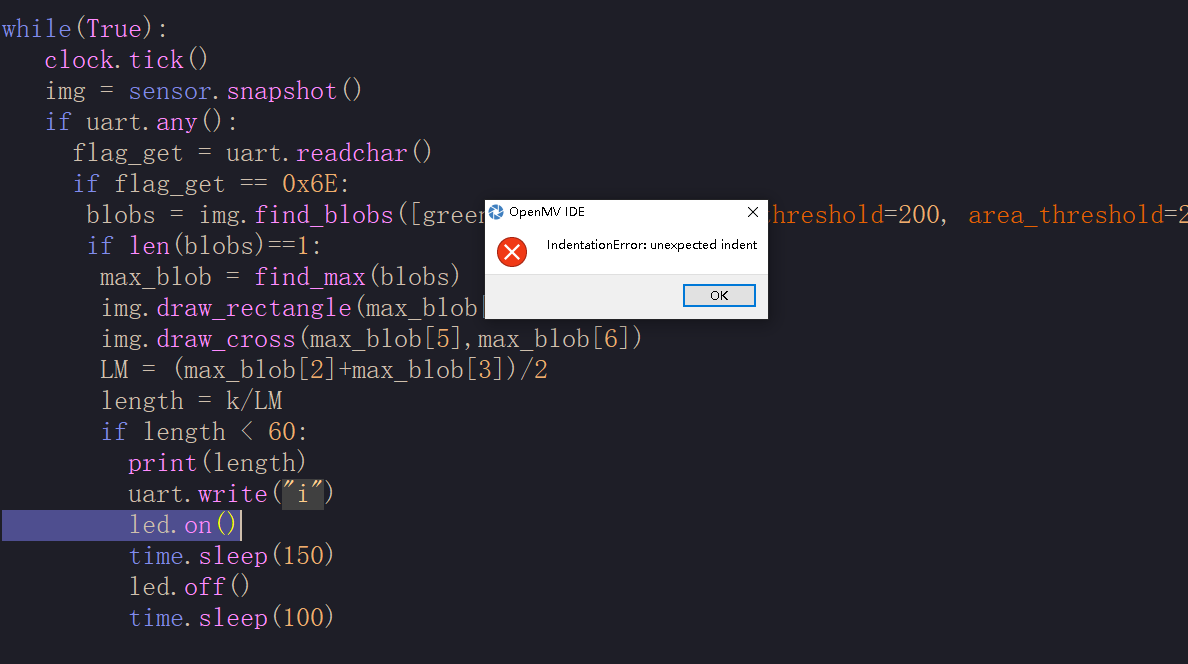
在这里有一个错误不知道怎么改急急急求指教发布在 OpenMV Cam
import sensor, image, time, math, pyb from pyb import UART led = pyb.LED(3) sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(10) sensor.set_auto_whitebal(False) clock = time.clock() uart = UART(3, 19200) k=4480 size_threshold = 2000 red_threshold = (73, 100, 44, -62, -51, 53) green_threshold = (0, 69, -128, -19, -128, 114) flag_get = 0 def find_max(blobs): max_size=0 for blob in blobs: if blob[2]*blob[3] > max_size: max_blob = blob max_size = blob[2]*blob[3] return max_blob while(True): clock.tick() img = sensor.snapshot() if uart.any(): flag_get = uart.readchar() if flag_get == 0x6E: blobs = img.find_blobs([green_threshold],pixels_threshold=200, area_threshold=200,merge=True) if len(blobs)==1: max_blob = find_max(blobs) img.draw_rectangle(max_blob[0:4]) img.draw_cross(max_blob[5],max_blob[6]) LM = (max_blob[2]+max_blob[3])/2 length = k/LM if length < 60: print(length) uart.write("i") led.on() time.sleep(150) led.off() time.sleep(100)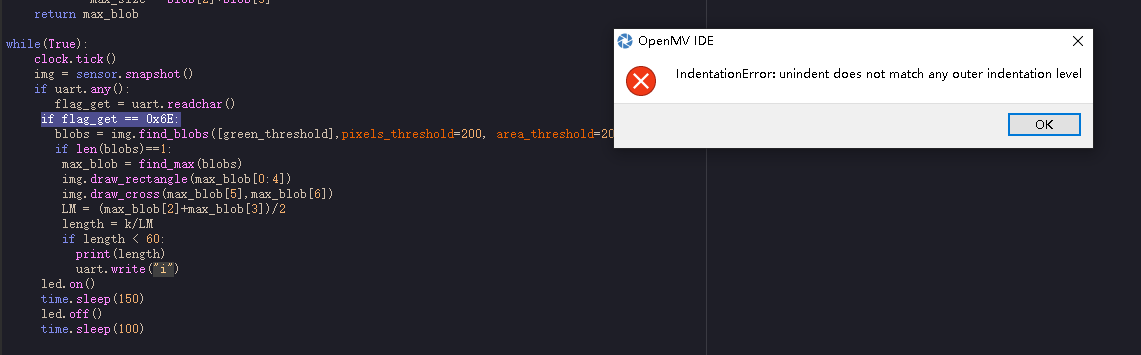
-
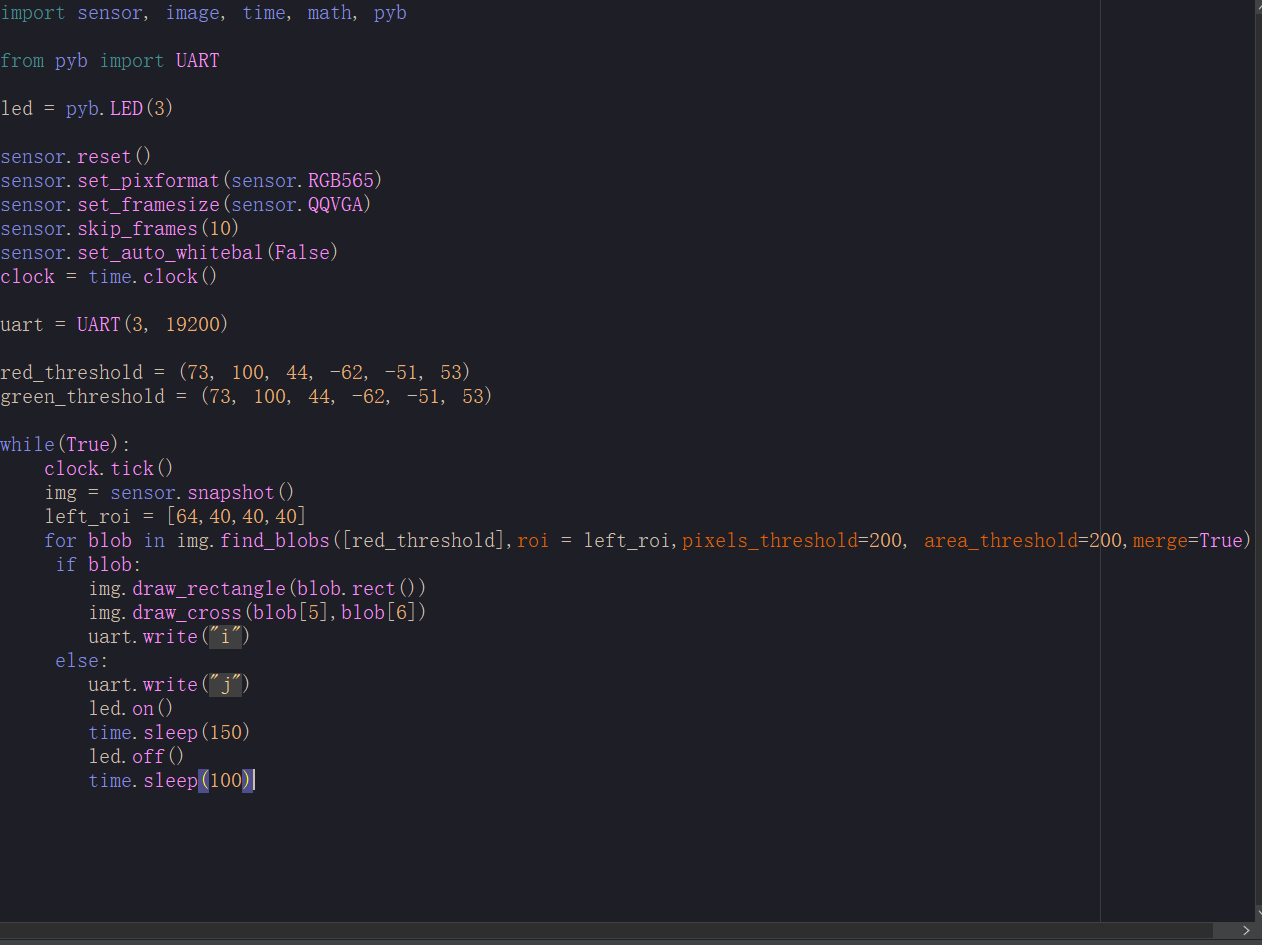
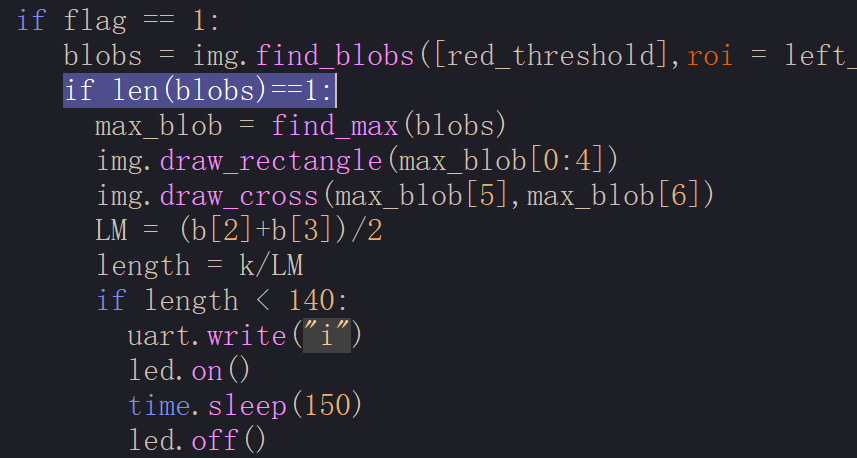
为什么在没有找到目标颜色快想让他串口发送数据却没发送发布在 OpenMV Cam
想让他在找到颜色块时发送数据“i”没找到颜色快时发送数据"j"可是现在只有在找到是发送没找到时就不发送这是为什么是哪里写错了么求指教

 这是哪里有错
这是哪里有错