为什么我采集三角形经常会让其他圆形或矩形来识别,总会混叠?
W
w3ks
@w3ks
0
声望
8
楼层
478
资料浏览
0
粉丝
0
关注
w3ks 发布的帖子
-
RE: 为什么我采集三角形经常会让其他圆形或矩形来识别,总会混叠发布在 OpenMV Cam
# Untitled - By: A - 周六 10月 10 2020 import sensor import image import time sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time=2000) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking clock = time.clock() enable_lens_corr = False # turn on for straighter lines...打开以获得更直的线条… thresholds = [(30, 100, 15, 127, 15, 127), # 红 (68, 81, -90, -24, 19, 90), # 绿 (28, 72, -7, 49, -103, -50)] # 蓝 # generic_red_thresholds -> index is 0 so code == (1 << 0) red = (30, 100, 15, 127, 15, 127) green = (0, 100, -94, -28, 22, 90) blue = (28, 72, -7, 49, -103, -50) if (sensor.get_id() == sensor.OV7725): sensor.__write_reg(0xAC, 0xDF) sensor.__write_reg(0x8F, 0xFF) min_degree = 0 max_degree = 179 def find_max(blobs): max_size = 0 for blob in blobs: if blob[2]*blob[3] > max_size: max_blob = blob max_size = blob[2]*blob[3] return max_blob while(True): clock.tick() img = sensor.snapshot().lens_corr(1.8) img.gaussian(1, unsharp=True) # 下面的`threshold`应设置为足够高的值,以滤除在图像中检测到的具有 # 低边缘幅度的噪声矩形。最适用与背景形成鲜明对比的矩形。 # 检测正方形 flag = 0 # 摄像头是否检测到物体 for r in img.find_rects(threshold=1000): area = (r.x(), r.y(), r.h(), r.w()) if r.x()<0 or r.y()<0: continue statistics = img.get_statistics (roi = area) # 像素颜色统计 m =(1/2)*r.w() n = (1/2)*r.h() # print(statistics) print(m,n) # (0,100,0,120,0,120)是红色的阈值,所以当区域内的众数(也就是最多的颜色),范围在这个阈值内,就说明是红色的矩形。 # l_mode(),a_mode(),b_mode()是L通道,A通道,B通道的众数。 if 20 < statistics.l_mode() < 80 and -12 < statistics.a_mode() < 90 and 2 < statistics.b_mode() < 93: # if the rectangle is red img.draw_rectangle(r.rect(), color=(255, 0, 0)) # 识别到的红色矩形用红色的矩框出来 print('这是一个红色矩形') m = int(m) n = int(n) img.draw_cross(r.x()+m, r.y() + n, size=5, color=(255,255,255)) flag = 1 if 5 < statistics.l_mode() < 81 and -73 < statistics.a_mode() < 16 and 9 < statistics.b_mode() < 75: # if the rectangle is red img.draw_rectangle(r.rect(), color=(0, 255, 0)) # 识别到的绿色矩形用绿色的矩框出来 m = int(m) n = int(n) img.draw_cross(r.x()+m, r.y() + n, size=5, color=(255,255,255)) print('这是一个绿色矩形') flag = 1 if 28 < statistics.l_mode() < 72 and -7 < statistics.a_mode() < 49 and -103 < statistics.b_mode() < -50: # if the rectangle is red img.draw_rectangle(r.rect(), color=(0, 0, 255)) # 识别到的蓝色矩形用蓝色的矩框出来 m = int(m) n = int(n) img.draw_cross(r.x()+m, r.y() + n, size=5, color=(255,255,255)) print('这是一个蓝色矩形') flag = 1 # print(r) # 检测圆 if flag == 0: # 检测圆 for c in img.find_circles(threshold=3500, x_margin=10, y_margin=10, r_margin=10, r_min=2, r_max=100, r_step=2): area = (c.x()-c.r(), c.y()-c.r(), 2*c.r(), 2*c.r()) # area为识别到的圆的区域,即圆的外接矩形框 statistics = img.get_statistics(roi=area) # 像素颜色统计 # print(statistics) # (0,100,0,120,0,120)是红色的阈值,所以当区域内的众数(也就是最多的颜色),范围在这个阈值内,就说明是红色的圆。 # l_mode(),a_mode(),b_mode()是L通道,A通道,B通道的众数。 if 30 < statistics.l_mode() < 100 and 15 < statistics.a_mode() < 127 and 15 < statistics.b_mode() < 127: # if the circle is red img.draw_circle(c.x(), c.y(), c.r() + 5, color=( 255, 0, 0)) # 识别到的红色圆形用红色的圆框出来 img.draw_cross(c.x(), c.y(),size = 5 ,color = (255,255,255)) print('这是一个红色的圆') flag = 1 if 68 < statistics.l_mode() < 81 and -90 < statistics.a_mode() < -24 and 19 < statistics.b_mode() < 90: # if the circle is red img.draw_circle(c.x(), c.y(), c.r() + 5, color=( 0, 255, 0)) # 识别到的绿色圆形用绿色的圆框出来 img.draw_cross(c.x(), c.y(),size = 5 ,color = (255,255,255)) print('这是一个绿色的圆') flag = 1 if 28 < statistics.l_mode() < 72 and -7 < statistics.a_mode() < 49 and -103 < statistics.b_mode() < -50: # if the circle is red img.draw_circle(c.x(), c.y(), c.r() + 5, color=( 0, 0, 255)) # 识别到的蓝色圆形用蓝色的圆框出来 img.draw_cross(c.x(), c.y(),size = 5 ,color = (255,255,255)) print('这是一个蓝色的圆') flag = 1 #print("FPS %f" % clock.fps()) # 检测三角形 if flag == 0: if img.find_blobs([red]): max_blob = find_max(img.find_blobs([red])) kernel_size = 1 # kernel width = (size*2)+1, kernel height = (size*2)+1 kernel = [-1, -1, -1,\ -1, +8, -1,\ -1, -1, -1] # 这个一个高通滤波器。见这里有更多的kernel # http://www.fmwconcepts.com/imagemagick/digital_image_filtering.pdf thresholds = [(100, 255)] # img.morph(kernel_size, kernel) img.binary(thresholds) img.erode(1, threshold = 1) line_segs = img.find_lines( [max_blob.x(), max_blob.y(), max_blob.w(), max_blob.h()]) if len(line_segs) == 3: for line_seg in line_segs: img.draw_line(line_seg.x1(), line_seg.y1(), line_seg.x2(), line_seg.y2()) print(line_seg) vertex_Ax = (line_segs[0].x1()+line_segs[1].x1())//2 vertex_Ay = (line_segs[0].y1()+line_segs[1].y1())//2 vertex_Dx = (line_segs[2].x1()+line_segs[2].x2())//2 vertex_Dy = (line_segs[2].y1()+line_segs[2].y2())//2 center_x = vertex_Ax-(vertex_Ax-vertex_Dx)*2//3 center_y = vertex_Ay-(vertex_Ay-vertex_Dy)*2//3 img.draw_cross(center_x, center_y, 5) # print(center_x,center_y) # print(center_x,center_y) print("这是红色的正三角形") if img.find_blobs([green]): max_blob = find_max(img.find_blobs([green])) kernel_size = 1 # kernel width = (size*2)+1, kernel height = (size*2)+1 kernel = [-1, -1, -1,\ -1, +8, -1,\ -1, -1, -1] # 这个一个高通滤波器。见这里有更多的kernel # http://www.fmwconcepts.com/imagemagick/digital_image_filtering.pdf thresholds = [(100, 255)] # img.morph(kernel_size, kernel) img.binary(thresholds) img.erode(1, threshold = 1) line_segs = img.find_lines( [max_blob.x(), max_blob.y(), max_blob.w(), max_blob.h()]) if len(line_segs) == 3: for line_seg in line_segs: img.draw_line(line_seg.x1(), line_seg.y1(), line_seg.x2(), line_seg.y2()) print(line_seg) vertex_Ax = (line_segs[0].x1()+line_segs[1].x1())//2 vertex_Ay = (line_segs[0].y1()+line_segs[1].y1())//2 vertex_Dx = (line_segs[2].x1()+line_segs[2].x2())//2 vertex_Dy = (line_segs[2].y1()+line_segs[2].y2())//2 center_x = vertex_Ax-(vertex_Ax-vertex_Dx)*2//3 center_y = vertex_Ay-(vertex_Ay-vertex_Dy)*2//3 img.draw_cross(center_x, center_y, 5) # print(center_x,center_y) # print(center_x,center_y) print("这是绿色的正三角形") if img.find_blobs([blue]): max_blob = find_max(img.find_blobs([blue])) kernel_size = 1 # kernel width = (size*2)+1, kernel height = (size*2)+1 kernel = [-1, -1, -1,\ -1, +8, -1,\ -1, -1, -1] # 这个一个高通滤波器。见这里有更多的kernel # http://www.fmwconcepts.com/imagemagick/digital_image_filtering.pdf thresholds = [(100, 255)] # img.morph(kernel_size, kernel) img.binary(thresholds) img.erode(1, threshold = 1) line_segs = img.find_lines( [max_blob.x(), max_blob.y(), max_blob.w(), max_blob.h()]) if len(line_segs) == 3: for line_seg in line_segs: img.draw_line(line_seg.x1(), line_seg.y1(), line_seg.x2(), line_seg.y2()) print(line_seg) vertex_Ax = (line_segs[0].x1()+line_segs[1].x1())//2 vertex_Ay = (line_segs[0].y1()+line_segs[1].y1())//2 vertex_Dx = (line_segs[2].x1()+line_segs[2].x2())//2 vertex_Dy = (line_segs[2].y1()+line_segs[2].y2())//2 center_x = vertex_Ax-(vertex_Ax-vertex_Dx)*2//3 center_y = vertex_Ay-(vertex_Ay-vertex_Dy)*2//3 img.draw_cross(center_x, center_y, 5) # print(center_x,center_y) # print(center_x,center_y) print("这是蓝色的正三角形")就这些,谢谢哈
-
RE: roi does not overlap on the image?经常出现这个问题怎么回事啊?发布在 OpenMV Cam
请# Untitled - By: A - 周六 10月 10 2020 import sensor import image import time sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time=2000) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking clock = time.clock() enable_lens_corr = False # turn on for straighter lines...打开以获得更直的线条… thresholds = [(30, 100, 15, 127, 15, 127), # 红 (68, 81, -90, -24, 19, 90), # 绿 (28, 72, -7, 49, -103, -50)] # 蓝 # generic_red_thresholds -> index is 0 so code == (1 << 0) red = (30, 100, 15, 127, 15, 127) green = (0, 100, -94, -28, 22, 90) blue = (28, 72, -7, 49, -103, -50) if (sensor.get_id() == sensor.OV7725): sensor.__write_reg(0xAC, 0xDF) sensor.__write_reg(0x8F, 0xFF) min_degree = 0 max_degree = 179 def find_max(blobs): max_size = 0 for blob in blobs: if blob[2]*blob[3] > max_size: max_blob = blob max_size = blob[2]*blob[3] return max_blob while(True): clock.tick() img = sensor.snapshot().lens_corr(1.8) img.gaussian(1, unsharp=True) # 下面的`threshold`应设置为足够高的值,以滤除在图像中检测到的具有 # 低边缘幅度的噪声矩形。最适用与背景形成鲜明对比的矩形。 # 检测正方形 flag = 0 # 摄像头是否检测到物体 for r in img.find_rects(threshold=3000): area = (r.x(), r.y(), r.h(), r.w()) statistics = img.get_statistics (roi = area) # 像素颜色统计 m =(1/2)*r.w() n = (1/2)*r.h() # print(statistics) print(m,n) # (0,100,0,120,0,120)是红色的阈值,所以当区域内的众数(也就是最多的颜色),范围在这个阈值内,就说明是红色的矩形。 # l_mode(),a_mode(),b_mode()是L通道,A通道,B通道的众数。 if 20 < statistics.l_mode() < 80 and -12 < statistics.a_mode() < 90 and 2 < statistics.b_mode() < 93: # if the rectangle is red img.draw_rectangle(r.rect(), color=(255, 0, 0)) # 识别到的红色矩形用红色的矩框出来 print('这是一个红色矩形') m = int(m) n = int(n) img.draw_cross(r.x()+m, r.y() + n, size=5, color=(255,255,255)) flag = 1 if 5 < statistics.l_mode() < 81 and -73 < statistics.a_mode() < 16 and 9 < statistics.b_mode() < 75: # if the rectangle is red img.draw_rectangle(r.rect(), color=(0, 255, 0)) # 识别到的绿色矩形用绿色的矩框出来 m = int(m) n = int(n) img.draw_cross(r.x()+m, r.y() + n, size=5, color=(255,255,255)) print('这是一个绿色矩形') flag = 1 if 28 < statistics.l_mode() < 72 and -7 < statistics.a_mode() < 49 and -103 < statistics.b_mode() < -50: # if the rectangle is red img.draw_rectangle(r.rect(), color=(0, 0, 255)) # 识别到的蓝色矩形用蓝色的矩框出来 m = int(m) n = int(n) img.draw_cross(r.x()+m, r.y() + n, size=5, color=(255,255,255)) print('这是一个蓝色矩形') flag = 1 # print(r)在这里粘贴代码
-
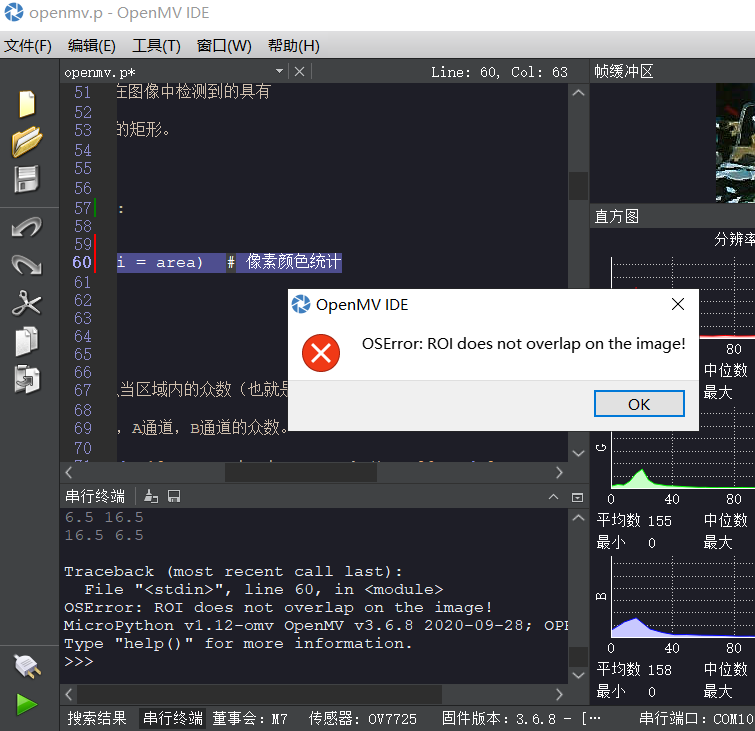
roi does not overlap on the image?经常出现这个问题怎么回事啊?发布在 OpenMV Cam
roi does not overlap on the image?经常出现这个问题怎么回事啊!12345678