@kidswong999 历程可以跑
W
w23d 发布的帖子
-
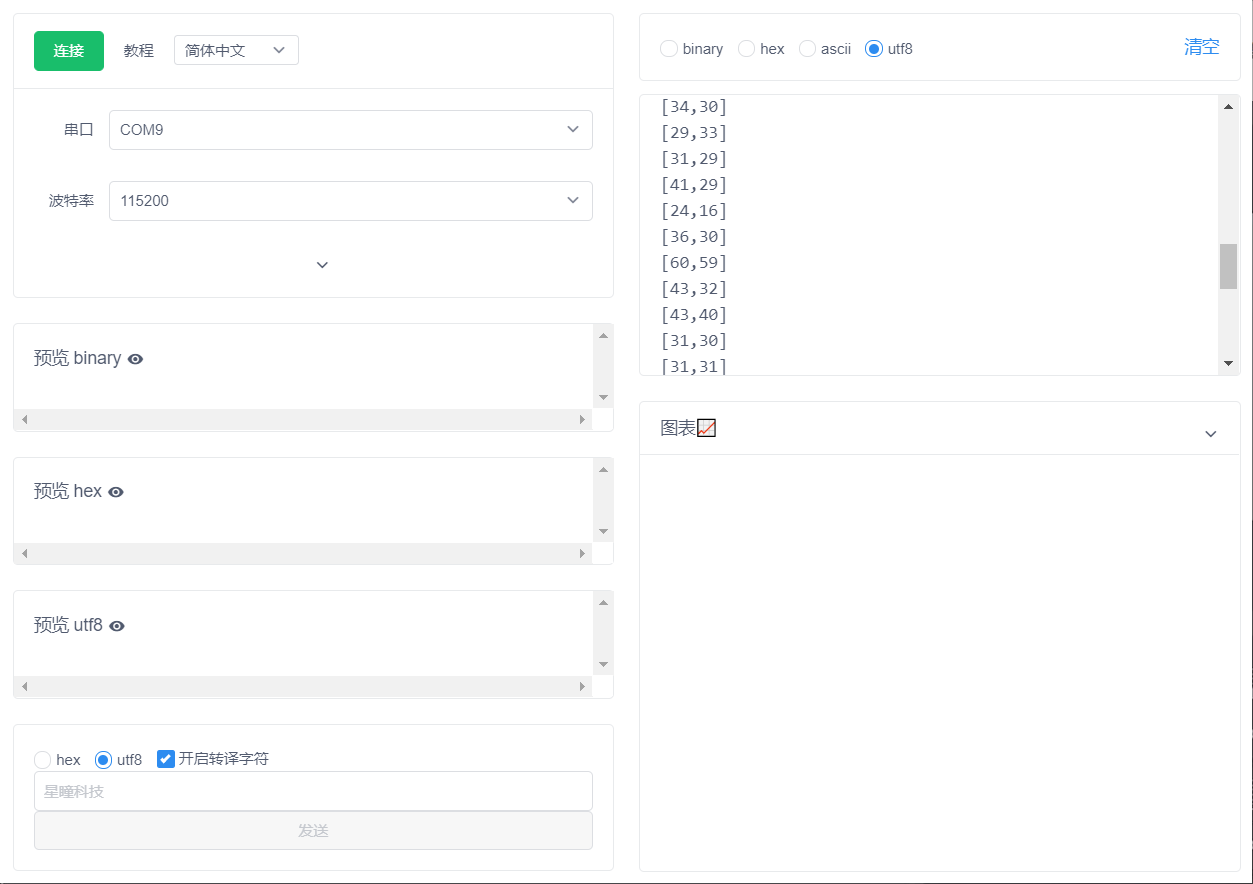
为什么串口助手接收不到这个代码的数据?发布在 OpenMV Cam
我的串口和波特率都没有选错
# 利用特征点检测特定物体例程。 # 向相机显示一个对象,然后运行该脚本。 一组关键点将被提取一次,然后 # 在以下帧中进行跟踪。 如果您想要一组新的关键点,请重新运行该脚本。 # 注意:请参阅文档以调整find_keypoints和match_keypoints。 import sensor, time, image, math from pyb import UART from struct import pack, unpack import json # Reset sensor sensor.reset() uart = UART(3, 115200) # Sensor settings sensor.set_contrast(3) sensor.set_gainceiling(16) sensor.set_framesize(sensor.VGA) sensor.set_windowing((320, 240)) sensor.set_pixformat(sensor.GRAYSCALE) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False, value=100) #画出特征点 def draw_keypoints(img, kpts): if kpts: print(kpts) img.draw_keypoints(kpts) img = sensor.snapshot() time.sleep_ms(1000) kpts1 = None #kpts1保存目标物体的特征,可以从文件导入特征,但是不建议这么做。 #kpts1 = image.load_descriptor("/desc.orb") #img = sensor.snapshot() #draw_keypoints(img, kpts1) clock = time.clock() while (True): clock.tick() img = sensor.snapshot() if (kpts1 == None): kpts1 = img.find_keypoints(max_keypoints=150, threshold=10, scale_factor=1.2) draw_keypoints(img, kpts1) else: kpts2 = img.find_keypoints(max_keypoints=150, threshold=10, normalized=True) if (kpts2): match = image.match_descriptor(kpts1, kpts2, threshold=85) if (match.count()>10): img.draw_rectangle(match.rect()) img.draw_cross(match.cx(), match.cy(), size=10) bx_x=match.cx()-160 by_y=120-match.cy() x=int(math.fabs(bx_x)) y=int(math.fabs(by_y)) #print(kpts2, "matched:%d dt:%d"%(match.count(), match.theta())) data = bytearray([x,y]) uart.write(data) print(data) img.draw_string(0, 0, "FPS:%.2f"%(clock.fps()))