串口终端显示:{"width":24, "height":24, "n_stages":25, "n_features":2913, "n_rectangles":6383}
ktp cnt=0
input face
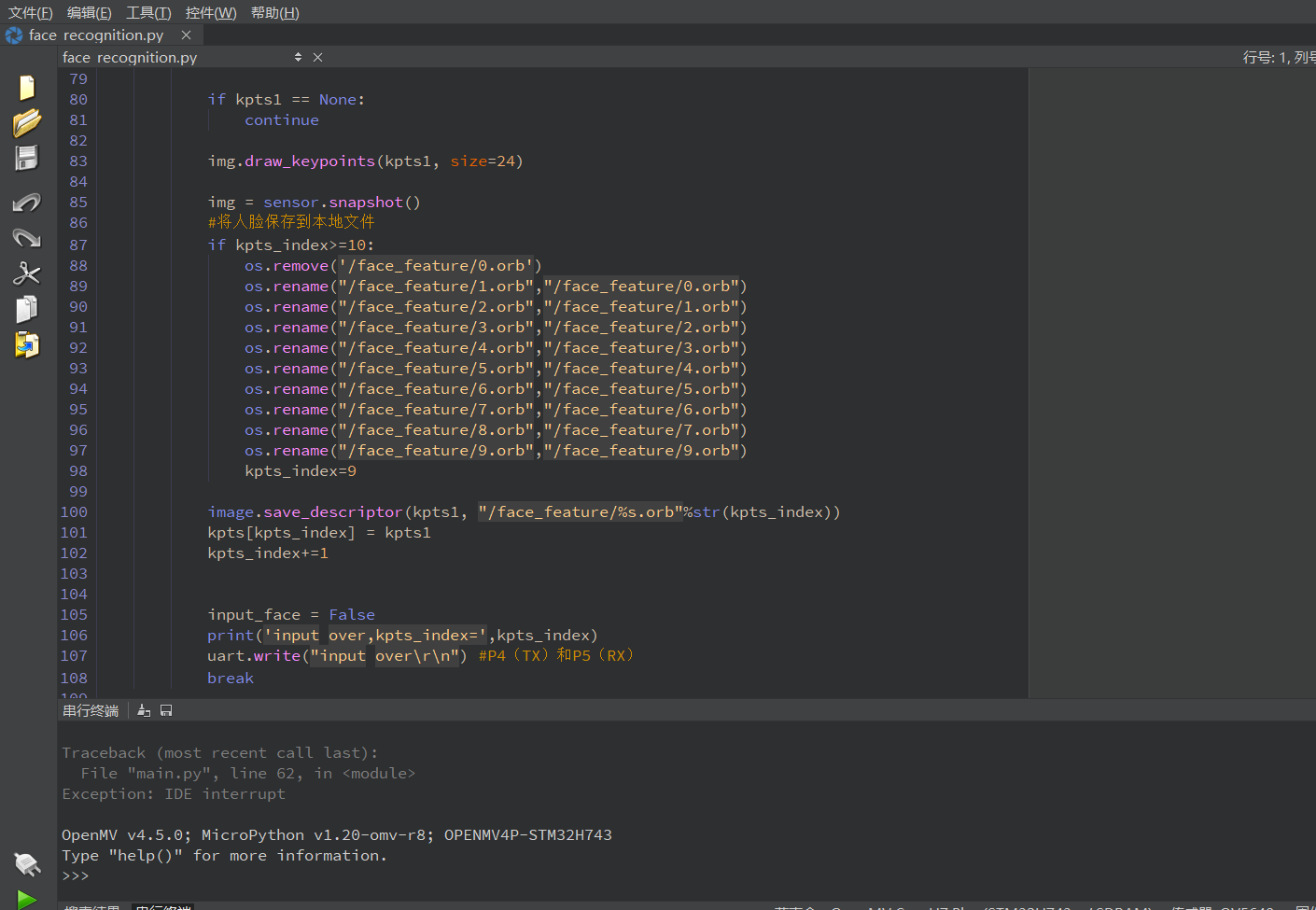
Traceback (most recent call last):
File "main.py", line 62, in
Exception: IDE interrupt
OpenMV v4.5.0; MicroPython v1.20-omv-r8; OPENMV4P-STM32H743
Type "help()" for more information.
"""
人脸识别例程
第一步先使用Haar Cascade找出人脸并记录该关键点
第二步就是不停的检测当前获取图片的关键点是否匹配
"""
# 导入相应的库
import sensor, image, time,os
import pyb
uart = pyb.UART(3, 115200, timeout_char = 1000)
# 初始化摄像头
sensor.reset()
# 设置相机图像的对比度为3
sensor.set_contrast(3)
# 设置相机的增益上限为16
sensor.set_gainceiling(16)
# 设置采集到照片的大小
sensor.set_framesize(sensor.VGA)
# 在VGA(640*480)下开个小窗口,相当于数码缩放
sensor.set_windowing((320, 240))
# 设置采集到照片的格式:灰色图像
sensor.set_pixformat(sensor.GRAYSCALE)
# 加载Haar Cascade 模型
# 默认使用25个步骤,减少步骤会加快速度但会影响识别成功率
face_cascade = image.HaarCascade("frontalface", stage = 25)
print(face_cascade)
# 特征数组
kpts=[None,None,None,None,None,None,None,None,None,None]
# 特征数组下标
kpts_index=0
# 录入人脸标志
input_face=False
#加载本地保存的人脸特征文件
for i in range(0,9):
try:
kpt_temp=image.load_descriptor("/face_feature/%s.orb"%(str(kpts_index)))
except:
break
kpts[kpts_index]=kpt_temp
kpts_index+=1
print('ktp cnt=%d'%(kpts_index))
while True:
#录入人脸,由单片机发送录入命令开启
while input_face:
# 拍摄图片并返回img
img = sensor.snapshot()
img.draw_string(0, 0, "Looking for a face...")
# 寻找人脸对象
# threshold和scale_factor两个参数控制着识别的速度和准确性
# threshold(0-1.0) 值越小检测速度越快,但误报率越高
# scale_factor(大于1.0)数值越大速度越快,匹配度越差
objects = img.find_features(face_cascade, threshold=1.0, scale_factor=0.9)
if objects:
# 将 ROI(x, y, w, h)往各个方向扩展31像素
face = (objects[0][0]-31,
objects[0][1]-31,
objects[0][2]+31*2,
objects[0][3]+31*2)
# 使用扩展后的ROI区域(人脸)学习关键点
kpts1 = img.find_keypoints(threshold = 10,
scale_factor = 1.2,
max_keypoints = 150,
roi = face)
if kpts1 == None:
continue
img.draw_keypoints(kpts1, size=24)
img = sensor.snapshot()
#将人脸保存到本地文件
if kpts_index>=10:
os.remove('/face_feature/0.orb')
os.rename("/face_feature/1.orb","/face_feature/0.orb")
os.rename("/face_feature/2.orb","/face_feature/1.orb")
os.rename("/face_feature/3.orb","/face_feature/2.orb")
os.rename("/face_feature/4.orb","/face_feature/3.orb")
os.rename("/face_feature/5.orb","/face_feature/4.orb")
os.rename("/face_feature/6.orb","/face_feature/5.orb")
os.rename("/face_feature/7.orb","/face_feature/6.orb")
os.rename("/face_feature/8.orb","/face_feature/7.orb")
os.rename("/face_feature/9.orb","/face_feature/9.orb")
kpts_index=9
image.save_descriptor(kpts1, "/face_feature/%s.orb"%str(kpts_index))
kpts[kpts_index] = kpts1
kpts_index+=1
input_face = False
print('input over,kpts_index=',kpts_index)
uart.write("input over\r\n") #P4(TX)和P5(RX)
break
#识别人脸
img = sensor.snapshot()
# 从图像中提取关键点
kpts2 = img.find_keypoints(threshold = 10,
scale_factor = 1.1,
max_keypoints = 100,
normalized = True)
if(kpts2):
for i in range(0,kpts_index):
kpts1 = kpts[i]
# 跟kpts1匹配
c = image.match_descriptor(kpts1, kpts2, threshold = 85)
# c[6]为match值,值越大表示匹配程度越高
match = c[6]
if(match > 7):
img.draw_rectangle(c[2:6])
img.draw_cross(c[0], c[1], color = (255,0,0), size = 10)
uart.write("recognition success,id="+str(i)+"\r\n") #P4(TX)和P5(RX)
print('recognition success')
print("id="+str(i)+"\r\n")
cmd = uart.readline()
if cmd != None:
cmd=cmd.decode()
if cmd=='input face\r\n':
print('input face')
input_face = True
cmd = None
现在就是不知道该怎么办,无法储存图像,但是以前可以正常储存图像和正常进行人脸识别