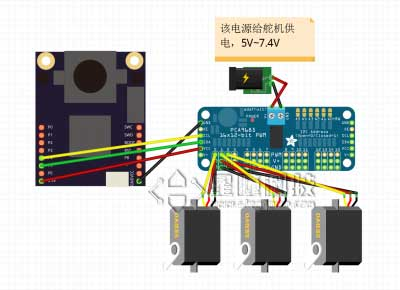
@kidswong999 噢噢 谢谢! 我可以用9V,2200mA的电池吗?会不会功率太大?
V
veb1 发布的帖子
-
RE: 如果在openmv的后方插入tb6612,前方插pca9685,两边正常电源供电会不会烧坏openmv?发布在 OpenMV Cam
-
RE: 如果在openmv的后方插入tb6612,前方插pca9685,两边正常电源供电会不会烧坏openmv?发布在 OpenMV Cam
@kidswong999 那这两块板子板子是串联关系吗?也就是两块板子控制电机的时候会分压?
-
RE: 如果在openmv的后方插入tb6612,前方插pca9685,两边正常电源供电会不会烧坏openmv?发布在 OpenMV Cam
@kidswong999 好的明白,如果我用追小球的小车那个3.7V的锂离子电池供电,那舵机能正常工作吗?
-
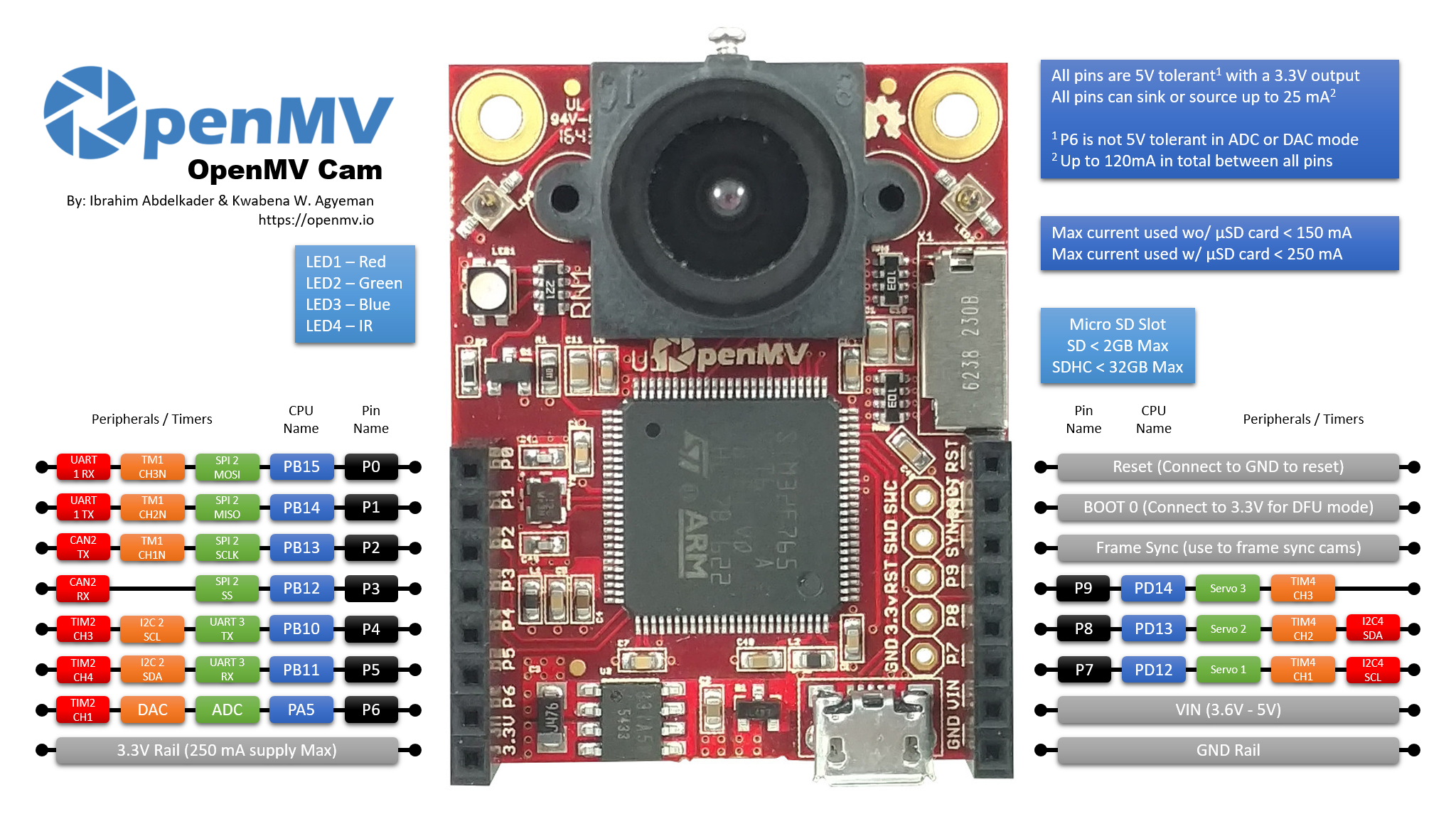
如果在openmv的后方插入tb6612,前方插pca9685,两边正常电源供电会不会烧坏openmv?发布在 OpenMV Cam
如果其中一个板子不插左下角这个 3.3V Rail(250mA supply max)的引脚会有是什么后果?
-
image.width() 这个函数的意思是返回以像素计的图像的外框宽度还是图像宽度?发布在 OpenMV Cam
image.width() 这个函数的意思是返回以像素计的图像的外框宽度还是图像宽度?
-
追小球的小车上的电机扩展版上可以接别的型号的电机吗?用比原配的锂离子电池电压大的电池会有什么后果呢?发布在 OpenMV Cam
追小球的小车上的电机扩展版上可以接别的型号的电机吗?用比原配的锂离子电池电压大的电池会有什么后果呢?
-
RE: 关于追小球的pid算法中 _RC 这个参数是什么?发布在 OpenMV Cam
@kidswong999 这个参数只在微分项里出现,可是小车这个是pi控制,没有用到程序里的微分项d,您看看式中这个 dt/(RC + dt)是表达什么,这个RC跟Td(微分时间常量)和kd有关系吗?看得懵懵的 哈哈
-
关于追小球的pid算法中 _RC 这个参数是什么?发布在 OpenMV Cam
from pyb import millis
from math import pi, isnanclass PID:
_kp = _ki = _kd = _integrator = _imax = 0
_last_error = _last_derivative = _last_t = 0
_RC = 1/(2 * pi * 20)
def init(self, p=0, i=0, d=0, imax=0):
self._kp = float(p)
self._ki = float(i)
self._kd = float(d)
self._imax = abs(imax)
self._last_derivative = float('nan')def get_pid(self, error, scaler): tnow = millis() dt = tnow - self._last_t output = 0 if self._last_t == 0 or dt > 1000: dt = 0 self.reset_I() self._last_t = tnow delta_time = float(dt) / float(1000) output += error * self._kp if abs(self._kd) > 0 and dt > 0: if isnan(self._last_derivative): derivative = 0 self._last_derivative = 0 else: derivative = (error - self._last_error) / delta_time derivative = self._last_derivative + \ ((delta_time / (self._RC + delta_time)) * \ (derivative - self._last_derivative)) self._last_error = error self._last_derivative = derivative output += self._kd * derivative output *= scaler if abs(self._ki) > 0 and dt > 0: self._integrator += (error * self._ki) * scaler * delta_time if self._integrator < -self._imax: self._integrator = -self._imax elif self._integrator > self._imax: self._integrator = self._imax output += self._integrator return output def reset_I(self): self._integrator = 0 self._last_derivative = float('nan')