import sensor, image, time, os, tf, math, uos, gc
from pyb import UART,LED
import json
import ustruct
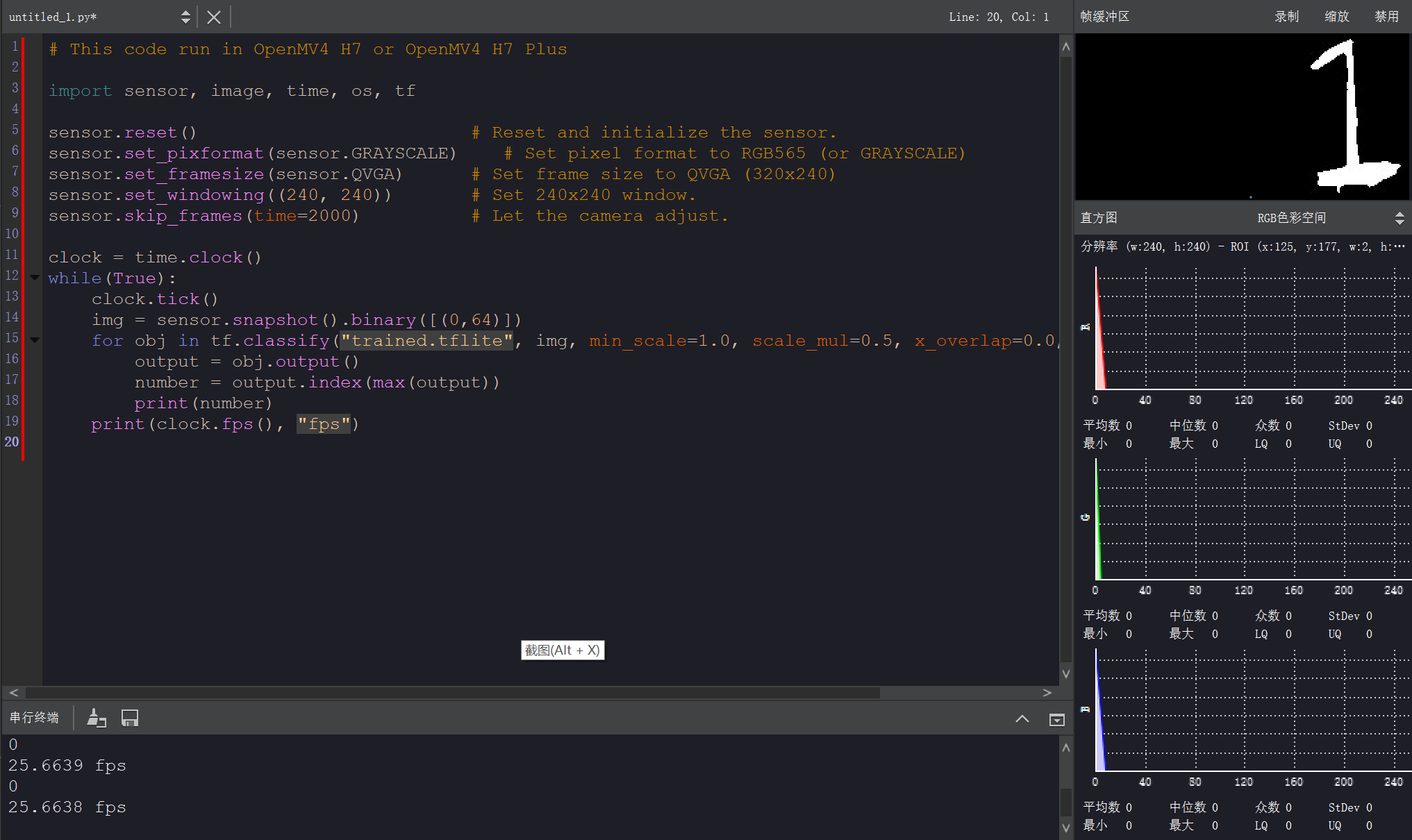
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.set_windowing((240, 240))
sensor.skip_frames(time=2000)
uart = UART(3,115200)
uart.init(115200, bits=8, parity=None, stop=1)
net = None
labels = None
min_confidence = 0.5
init_num=None
def sending_data(cx,cy,cw,ch):
global uart;
data = bytearray([0x2C,4,cx,cy,0x5B])
uart.write(data);
def recive_data():
global uart
if uart.any():
tmp_data = uart.readchar();
print(tmp_data)
try:
net = tf.load("trained.tflite", load_to_fb=uos.stat('trained.tflite')[6] > (gc.mem_free() - (64*1024)))
except Exception as e:
raise Exception('Failed to load "trained.tflite", did you copy the .tflite and labels.txt file onto the mass-storage device? (' + str(e) + ')')
try:
labels = [line.rstrip('\n') for line in open("labels.txt")]
except Exception as e:
raise Exception('Failed to load "labels.txt", did you copy the .tflite and labels.txt file onto the mass-storage device? (' + str(e) + ')')
colors = [
(255, 0, 0),
( 0, 255, 0),
(255, 255, 0),
( 0, 0, 255),
(255, 0, 255),
( 0, 255, 255),
(255, 255, 255),
]
clock = time.clock()
while(True):
clock.tick()
img = sensor.snapshot()
for i, detection_list in enumerate(net.detect(img, thresholds=[(math.ceil(min_confidence * 255), 255)])):
if (i == 0): continue
if (len(detection_list) == 0): continue
print("********** %s **********" % labels[i])
for d in detection_list:
[x, y, w, h] = d.rect()
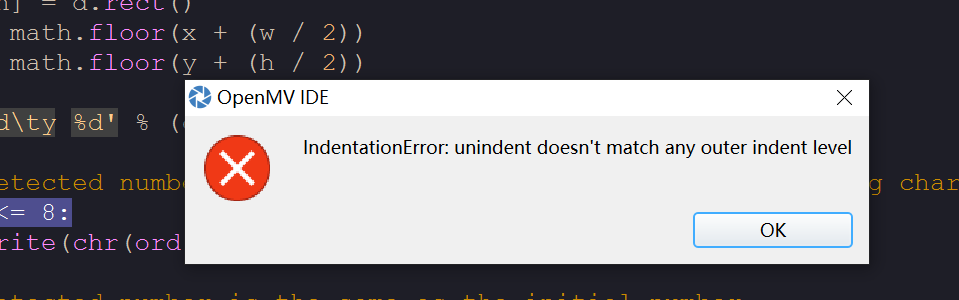
center_x = math.floor(x + (w / 2))
center_y = math.floor(y + (h / 2))
print('x %d\ty %d' % (center_x, center_y))
# If the detected number is between 1 and 8, send the corresponding character 'A'-'H'.
if 1 <= i <= 8:
uart.write(chr(ord('A') + i - 1))
# If the detected number is the same as the initial number
if i == init_num:
# If the number is on the left half of the image, send 'L'.
if center_x < img.width() / 2:
uart.write('L')
# If the number is on the right half of the image, send 'R'.
elif center_x > img.width() / 2:
uart.write('R')
"""if center_x < img.width() / 2:
print('Object is on the left')
else:
print('Object is on the right')
print('x %d\ty %d' % (center_x, center_y))"""
img.draw_circle((center_x, center_y, 12), color=colors[i], thickness=2)
print(clock.fps(), "fps", end="\n\n")
 蹲个解决方法
蹲个解决方法