import sensor, image, time ,math ,struct
from pyb import UART
from struct import pack, unpack
import json
from image import SEARCH_EX, SEARCH_DS
red_threshold =(8, 95, 29, 79, 12, 68)#(9, 90, 52, 79, 12, 68)#(7, 90, 12, 70, -6, 41)#(15, 100, 40, 100, 40, 80)#(100, 27, 28, 111, 94, -59)
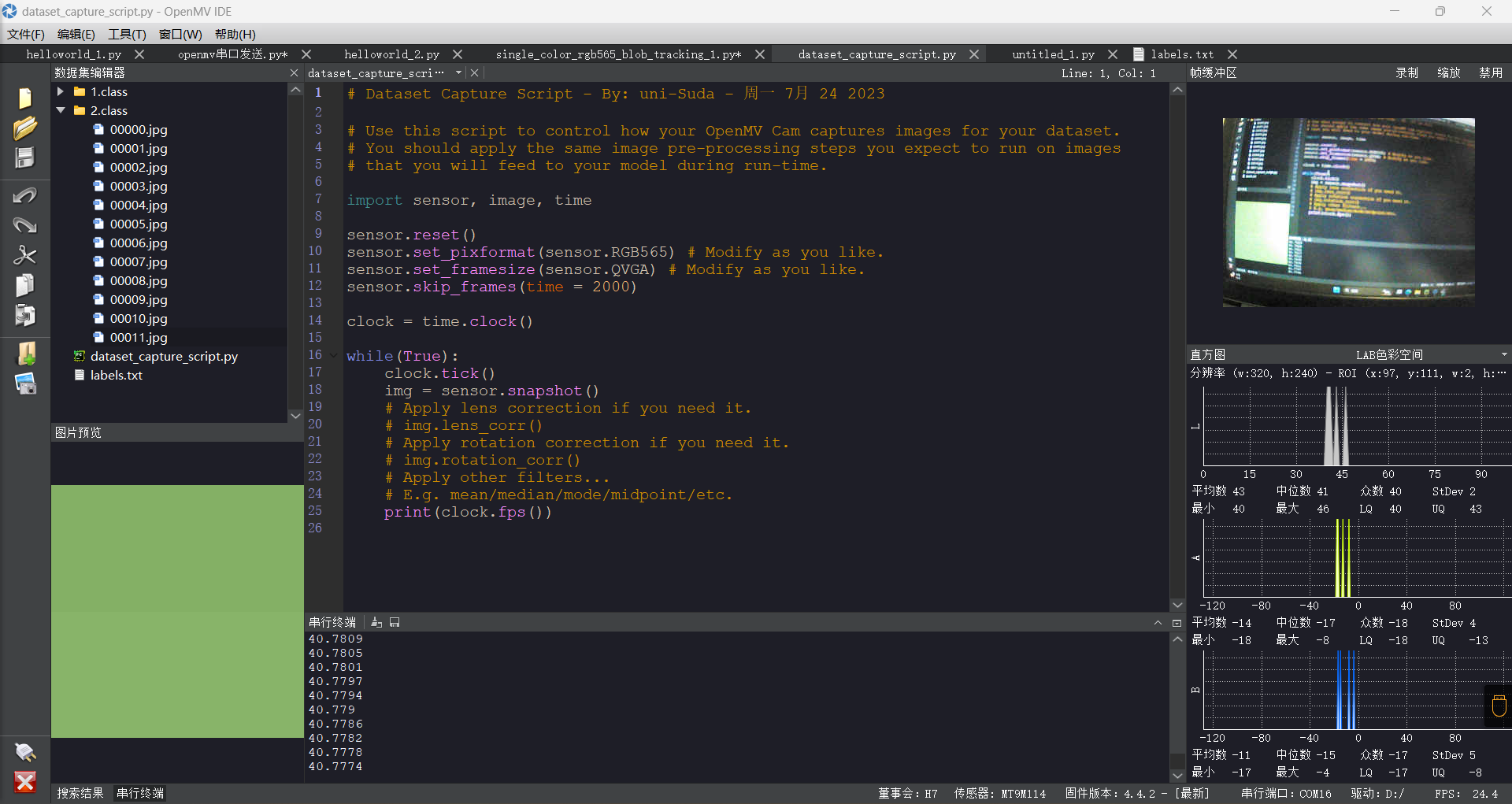
sensor.reset()
sensor.set_pixformat(sensor.GRAYSCALE)
sensor.set_framesize(sensor.QQVGA)
sensor.skip_frames(time=3000)
sensor.set_auto_whitebal(False)
clock = time.clock()
uart = UART(1, 115200)
template = image.Image("/0.pgm")
def find_max(blobs):
max_size=1
if blobs:
max_blob = 0
for blob in blobs:
blob_size = blob.w()*blob.h()
if ( (blob_size > max_size) & (blob_size > 100) & (blob.density()>0.8*math.pi/4) & (blob.density()<1.2*math.pi/4) ) :
if ( math.fabs( blob.w() / blob.h() - 1 ) < 0.5 ) :
max_blob=blob
max_size = blob.w()*blob.h()
return max_blob
def find_red(blobs):
max_size = 0
for blob in blobs:
if blob[2]*blob[3] > max_size:
max_blob=blob
max_size = blob[2]*blob[3]
return max_size
def line_filter_copy(src, dst):
for i in range(0, len(dst), 1):
dst[i] = src[i<<1]
def line_filter_bw(src, dst):
for i in range(0, len(dst), 1):
if (src[i<<1] > 200 and src[i<<1] < 255):
dst[i] = 0xFF
else:
dst[i] = 0x00
k = 0
max_number = 0
a = 0
b = 0
min_yellow = 0
tmp_data = 0
while(True):
clock.tick()
lines = 0
img = sensor.snapshot(line_filter = line_filter_copy)
red_blobs = img.find_template(template, 0.70, step=4, search=SEARCH_EX)
max_blob=find_max(red_blobs)
last_x = 1000
last_y = 1000
if max_blob:
img.draw_rectangle(max_blob.rect())
img.draw_cross(max_blob.cx(), max_blob.cy())
bx_x=max_blob.cx()-160
by_y=120-max_blob.cy()
x=math.fabs(bx_x)
y=math.fabs(by_y)
if 0 <= x < 10 :
bx_value = 1
elif 10 <= x < 100 :
bx_value = 2
else :
bx_value = 3
if 0 <= y < 10 :
by_value = 1
elif 10 <= y < 100 :
by_value = 2
else :
by_value = 3
sumA = 0
sumB = 0
data = bytearray([0x41,0x43])
uart.write(data)
data = bytearray([0x02,8])
for b in data:
sumB = sumB + b
sumA = sumA + sumB
uart.write(data)
float_value = bx_x
float_bytes = pack('f', float_value)
for b in float_bytes:
sumB = sumB + b
sumA = sumA + sumB
uart.write(float_bytes)
float_value = by_y
float_bytes = pack('f', float_value)
for b in float_bytes:
sumB = sumB + b
sumA = sumA + sumB
uart.write(float_bytes)
data = bytearray([sumB, sumA])
uart.write(data)
print("found: x=",bx_x," y=",by_y)
#b_output_str="x%d%d,y%d%d" % (bx_value,bx_x,by_value,by_y)
#print('you send black:',b_output_str)
#uart.write(b_output_str+'\r\n')
else:
sumA = 0
sumB = 0
data = bytearray([0x41,0x43])
uart.write(data)
data = bytearray([0x01,0])
for b in data:
sumB = sumB + b
sumA = sumA + sumB
uart.write(data)
data = bytearray([sumB, sumA])
uart.write(data)
print(sumA," ",sumB)
#print('not found!')
#b_output_str = "x10,y10"
#print('you send black:',b_output_str)
#b_output_str = "x3750,y3750"
#uart.write(b_output_str+'\r\n')
#pass