运行halloworld的时候图像颜色很怪异,不知道是什么问题,求大神解答
U
uggq 发布的帖子
-
为什么.find_blob函数设置pixel_threshold参数为4000依然会识别到pixels为2317的色块?发布在 OpenMV Cam
import sensor, image, time sensor.reset() sensor.set_pixformat(sensor.GRAYSCALE) sensor.set_framesize(sensor.QVGA) sensor.skip_frames(time = 2000) sensor.set_auto_whitebal(False) clock = time.clock() while(True): clock.tick() img = sensor.snapshot().lens_corr(1.8) thr = img.histogram().get_threshold() # print('threshold',thr[0]) # img.binary([(thr[0],255)]) img = img.binary([(0,thr[0])]) blob0 = img.find_blobs([(255,255)],pixel_threshold = 4000) print(blob0) lin = img.get_regression([(thr[0],255)], roi = (70,0,180,240)) # if (blob0): # img.draw_rectangle((277, 0, 43, 69), color = 127) if (lin): img.draw_line(lin.line(), color = 127) print(lin)识别到的图像如下:
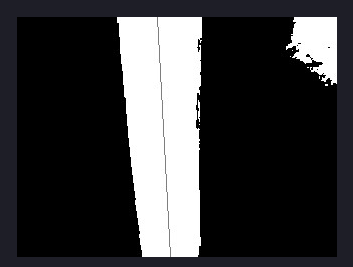
打印出来的结果如下:
[{"x":100, "y":0, "w":85, "h":240, "pixels":16918, "cx":146, "cy":112, "rotation":1.518160, "code":1, "count":1, "perimeter":744, "roundness":0.091413},
{"x":268, "y":0, "w":52, "h":69, "pixels":2353, "cx":300, "cy":28, "rotation":1.209709, "code":1, "count":1, "perimeter":375, "roundness":0.503028},
{"x":315, "y":69, "w":5, "h":3, "pixels":10, "cx":318, "cy":70, "rotation":2.727168, "code":1, "count":1, "perimeter":10, "roundness":0.332269},
{"x":181, "y":83, "w":2, "h":21, "pixels":35, "cx":182, "cy":93, "rotation":1.556911, "code":1, "count":1, "perimeter":42, "roundness":0.014494}]
{"x1":140, "y1":0, "x2":153, "y2":239, "length":239, "magnitude":2, "theta":177, "rho":-140}
[{"x":100, "y":0, "w":85, "h":240, "pixels":16919, "cx":146, "cy":112, "rotation":1.517971, "code":1, "count":1, "perimeter":741, "roundness":0.091471},
{"x":268, "y":0, "w":52, "h":69, "pixels":2317, "cx":300, "cy":27, "rotation":1.202760, "code":1, "count":1, "perimeter":418, "roundness":0.512365},
{"x":181, "y":83, "w":2, "h":20, "pixels":33, "cx":182, "cy":92, "rotation":1.562700, "code":1, "count":1, "perimeter":40, "roundness":0.015920}]
{"x1":140, "y1":0, "x2":153, "y2":239, "length":239, "magnitude":2, "theta":177, "rho":-140}非常感谢各路大神指导