sensor.reset() # 复位并初始化传感器。
sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE)
#设置图像色彩格式,有RGB565色彩图和GRAYSCALE灰度图两种
sensor.set_framesize(sensor.QVGA) # 将图像大小设置为QVGA (320x240)
sensor.set_windowing((128, 128)) # 设置128 x128窗口。
sensor.skip_frames(time=750) # 不要让自动增益运行太长时间。
sensor.set_auto_gain(False) # 关掉自动增益。
sensor.set_auto_exposure(False) # 关掉自动曝光。
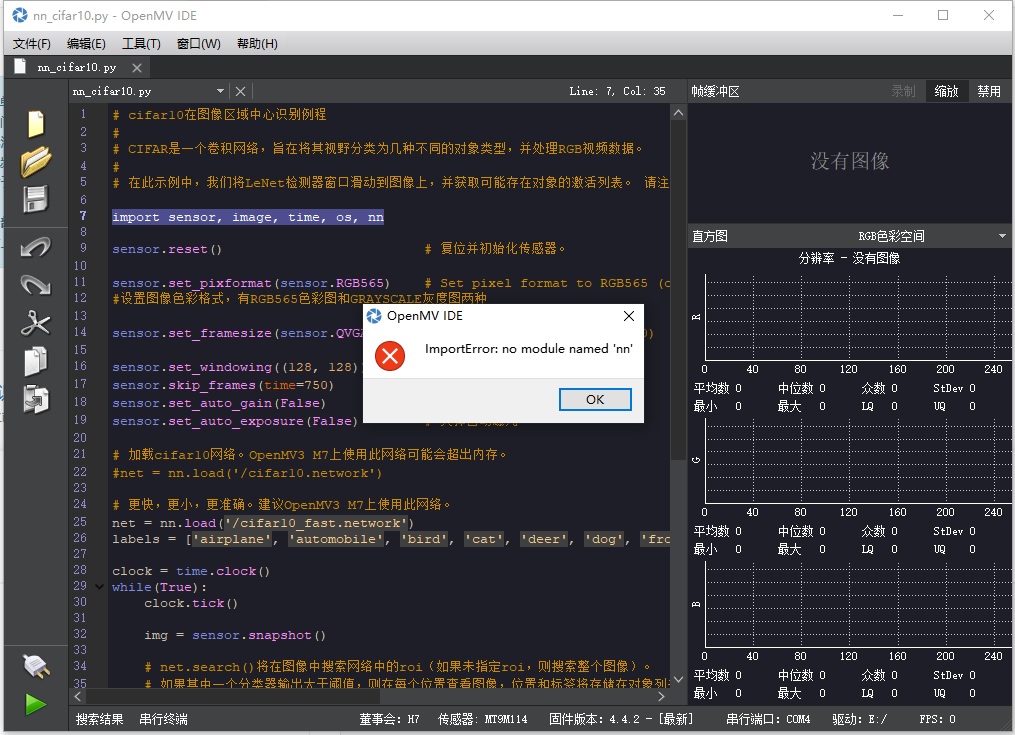
加载cifar10网络。OpenMV3 M7上使用此网络可能会超出内存。
#net = nn.load('/cifar10.network')
net = nn.load('/cifar10_fast.network')
labels = ['airplane', 'automobile', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck']
clock = time.clock()
while(True):
clock.tick()
img = sensor.snapshot()
for obj in net.search(img, threshold=0.6, min_scale=0.4, scale_mul=0.8,
x_overlap=-1, y_overlap=-1, contrast_threshold=0.5):
print("Detected %s - Confidence %f%%" % (labels[obj.index()], obj.value()))
img.draw_rectangle(obj.rect(), color=(255, 0, 0))
print(clock.fps())