start=utime.ticks_ms()
delta=utime.ticks_diff(utime.ticks_ms(),start)
请问利用这两个函数是可以得到某一段程序的执行时间吗?
delta返回的是时间值还是计数值呢?还有单位是什么呢?谢谢
R
rinz
@rinz
0
声望
15
楼层
1441
资料浏览
0
粉丝
0
关注
rinz 发布的帖子
-
openmv中程序执行的计时问题发布在 OpenMV Cam
-
请问确定好某一色块的坐标之后怎么计算舵机的转角呢发布在 OpenMV Cam
开始的时候openmv和舵机处于中位的时候对齐,如果检测到某个在openmv右边的一个物体的坐标怎么转换成舵机的转角使舵机正对物体呢
-
openmv通过串口通信发送指令驱动机械臂舵机转动时,用串口调试工具为什么没有检测到接受的数据发布在 OpenMV Cam
不好意思还要麻烦你一下,我用openmv通过串口通信发送指令驱动机械臂舵机转动时,用串口调试工具为什么没有检测到接受的数据?但是舵机转动了

-
发送指令控制舵机不动发布在 OpenMV Cam
 请问通过openmv发送指令控制舵机时,当我把串口线都连好之后,他不执行动作,只有当我把tx rx两条线重新插进去的时候,才会执行动作,而且动作还不完整,这是为什么呢
请问通过openmv发送指令控制舵机时,当我把串口线都连好之后,他不执行动作,只有当我把tx rx两条线重新插进去的时候,才会执行动作,而且动作还不完整,这是为什么呢 -
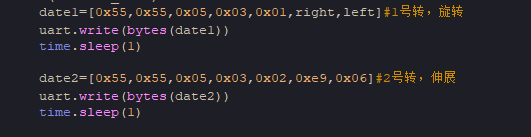
请教程序发布在 OpenMV Cam
import time from pyb import UART uart = UART(3, 9600) uart.init(9600, bits=8, parity=None) data=bytes([0x55,0x55,0x05,0x03,0x02,0xe9,0x06]) while(True): uart.write(data) time.sleep(1000)请问这样写对吗
