R
ri1k 发布的帖子
-
RE: 我想吧这拆机代码改为IO输入输出 有注释发布在 OpenMV Cam
@kidswong999 
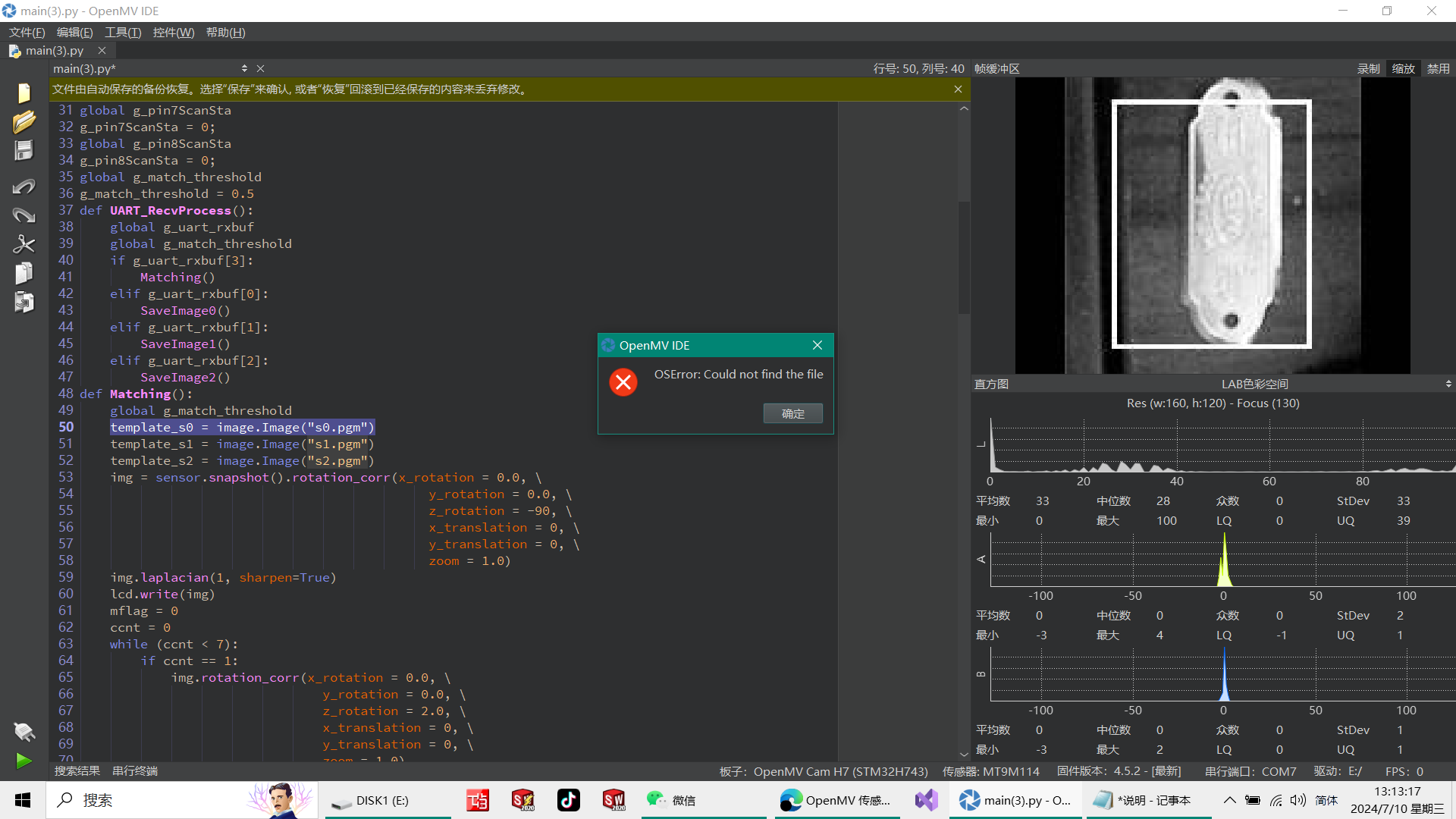
这是什么问题 -
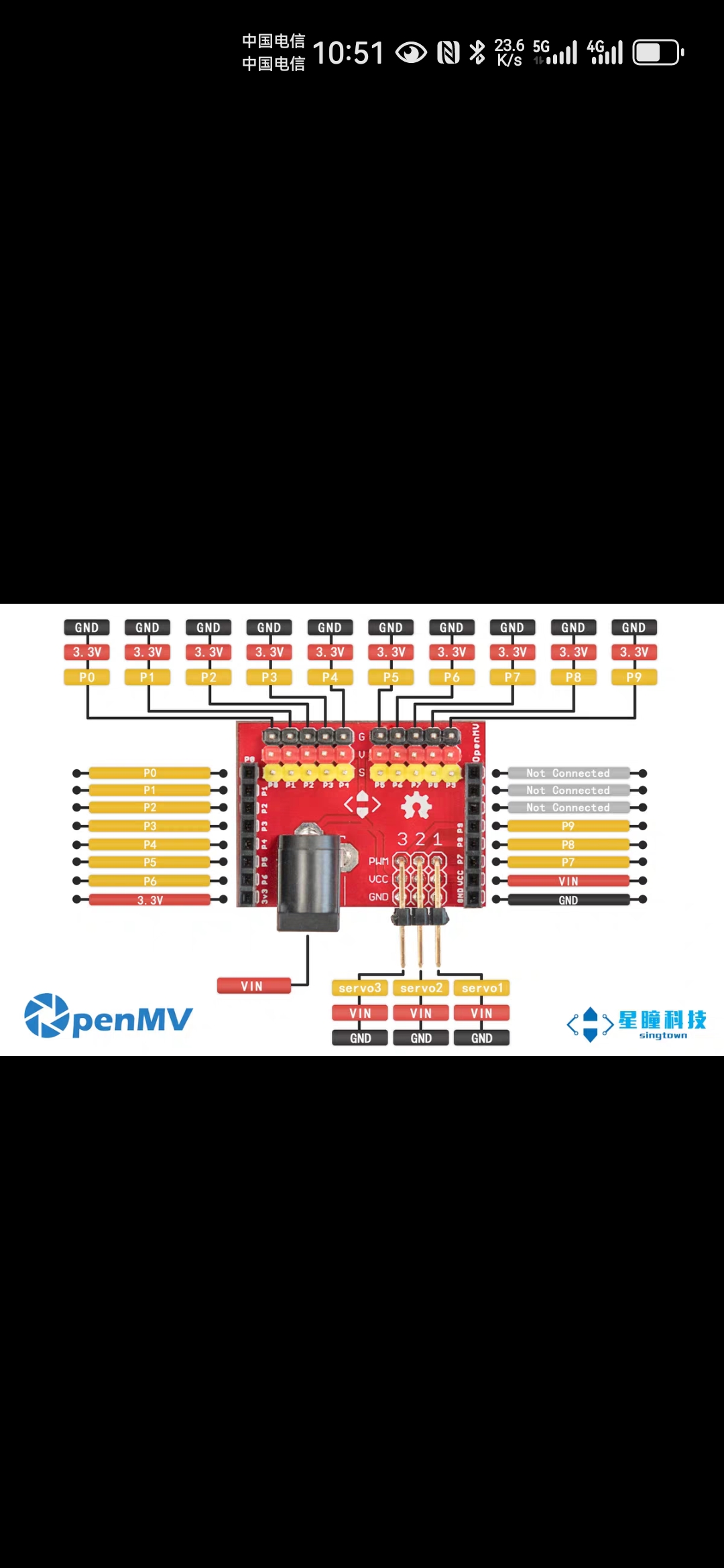
我想吧这拆机代码改为IO输入输出 有注释发布在 OpenMV Cam
# Template Matching Example - Normalized Cross Correlation (NCC) # # This example shows off how to use the NCC feature of your OpenMV Cam to match # image patches to parts of an image... expect for extremely controlled enviorments # NCC is not all to useful. # # WARNING: NCC supports needs to be reworked! As of right now this feature needs # a lot of work to be made into somethin useful. This script will reamin to show # that the functionality exists, but, in its current state is inadequate. import time, sensor, image, pyb, lcd RED_LED_PIN = 1 BLUE_LED_PIN = 3 from image import SEARCH_EX, SEARCH_DS from pyb import UART from pyb import Pin # Reset sensor sensor.reset() # Set sensor settings sensor.set_auto_gain(False) sensor.set_contrast(3) sensor.set_brightness(0) #sensor.set_vflip(True) sensor.set_gainceiling(16) # Max resolution for template matching with SEARCH_EX is QQVGA sensor.set_framesize(sensor.QQVGA) # You can set windowing to reduce the search image. #sensor.set_windowing(((640-80)//2, (480-60)//2, 80, 60)) sensor.set_pixformat(sensor.GRAYSCALE) #sensor.set_pixformat(sensor.RGB565) # or sensor.GRAYSCALE #sensor.set_framesize(sensor.QQVGA2) # Special 128x160 framesize for LCD Shield. lcd.init() # Initialize the lcd screen. uart = UART(3, 19200, timeout_char=1000) # GPIO Initial #pin7 = Pin('P7', Pin.IN, Pin.PULL_UP) #pin8 = Pin('P8', Pin.IN, Pin.PULL_UP) #pin9 = Pin('P9', Pin.OUT_PP, Pin.PULL_NONE) clock = time.clock() # 定义工作模式 ------------------------------------ global g_workMode g_workMode = 0 WORK_MODE_MATCHING = 0 WORK_MODE_SNAPSHOT = 1 # ----------------------------------------------- # 串口接收缓冲 global g_uart_rxbuf g_uart_rxbuf = [0,0,0,0] #global g_timer_100ms global g_pin7ScanSta g_pin7ScanSta = 0; global g_pin8ScanSta g_pin8ScanSta = 0; global g_match_threshold g_match_threshold = 0.0 """ 串口接收数据处理 """ def UART_RecvProcess(): global g_uart_rxbuf global g_match_threshold if g_uart_rxbuf[0] == 101: #ord('m'): # 执行匹配检测操作 g_match_threshold = float(g_uart_rxbuf[1]) / 100 print(g_match_threshold) Matching() elif g_uart_rxbuf[0] == 102: #ord('r'): # 拍照并保存匹配比较模板 SaveImage0() elif g_uart_rxbuf[0] == 103: # ord('s'): # 拍照并保存匹配比较模板 SaveImage1() elif g_uart_rxbuf[0] == 104: # ord('t'): # 拍照并保存匹配比较空板 SaveImage2() elif g_uart_rxbuf[0] == 105: # ord('c'): # 拍照并保存匹配比较模板 pyb.LED(RED_LED_PIN).off() pyb.LED(BLUE_LED_PIN).off() """ 执行匹配检测操作函数 """ def Matching(): global g_match_threshold # Load template. # Template should be a small (eg. 32x32 pixels) grayscale image. template_s0 = image.Image("s0.pgm") #空图片 template_s1 = image.Image("s1.pgm") #正模板图片 template_s2 = image.Image("s2.pgm") #反模板图片 #sensor.skip_frames(time = 200) #clock.tick() #img = sensor.snapshot() img = sensor.snapshot().rotation_corr(x_rotation = 0.0, \ y_rotation = 0.0, \ z_rotation = -90, \ x_translation = 0, \ y_translation = 0, \ zoom = 1.0) # Run the kernel on every pixel of the image. img.laplacian(1, sharpen=True) lcd.display(img) # find_template(template, threshold, [roi, step, search]) # ROI: The region of interest tuple (x, y, w, h). # Step: The loop step used (y+=step, x+=step) use a bigger step to make it faster. # Search is either image.SEARCH_EX for exhaustive search or image.SEARCH_DS for diamond search # # Note1: ROI has to be smaller than the image and bigger than the template. # Note2: In diamond search, step and ROI are both ignored. mflag = 0 #########################################33 ccnt = 0 while (ccnt < 7): # 如果原图片匹配错误,则旋转一定角度再进行匹配 if ccnt == 1: img.rotation_corr(x_rotation = 0.0, \ y_rotation = 0.0, \ z_rotation = 2.0, \ x_translation = 0, \ y_translation = 0, \ zoom = 1.0) elif ccnt == 2: img.rotation_corr(x_rotation = 0.0, \ y_rotation = 0.0, \ z_rotation = 4.0, \ x_translation = 0, \ y_translation = 0, \ zoom = 1.0) elif ccnt == 3: img.rotation_corr(x_rotation = 0.0, \ y_rotation = 0.0, \ z_rotation = -6.0, \ x_translation = 0, \ y_translation = 0, \ zoom = 1.0) elif ccnt == 4: img.rotation_corr(x_rotation = 0.0, \ y_rotation = 0.0, \ z_rotation = -2.0, \ x_translation = 0, \ y_translation = 0, \ zoom = 1.0) if mflag == 0: #g_match_threshold = float(g_uart_rxbuf[1]) / 100 #print(g_match_threshold) r = img.find_template(template_s1, g_match_threshold, step=1, search=SEARCH_EX) #, roi=(10, 0, 60, 60)) if r: mflag = 2 break if mflag == 0: #g_match_threshold = float(g_uart_rxbuf[1]) / 100 #print(g_match_threshold) r = img.find_template(template_s2, g_match_threshold, step=1, search=SEARCH_EX) #, roi=(10, 0, 60, 60)) if r: mflag = 3 break if mflag == 0: #g_match_threshold = float(g_uart_rxbuf[1]) / 100 #print(g_match_threshold) r = img.find_template(template_s0, g_match_threshold, step=1, search=SEARCH_EX) #, roi=(10, 0, 60, 60)) if r: mflag = 1 break ccnt = ccnt + 1 ####################################################33 if mflag == 1: # 空商标 pyb.LED(RED_LED_PIN).on() img.draw_string(35, 15, "NC", scale=1) uart.write("0") elif mflag == 2: # 正模板匹配 pyb.LED(BLUE_LED_PIN).on() img.draw_rectangle(r) img.draw_string(35, 15, "OK", scale=1) lcd.display(img) uart.write("1") elif mflag == 3: # 反模板匹配 pyb.LED(RED_LED_PIN).on() img.draw_string(35, 15, "IN", scale=1) uart.write("2") elif mflag == 0: # 商标错误 pyb.LED(RED_LED_PIN).on() img.draw_string(35, 15, "ER", scale=1) uart.write("3") time.sleep(100) pyb.LED(RED_LED_PIN).off() pyb.LED(BLUE_LED_PIN).off() #print(clock.fps()) """ 拍照工作模式执行函数 """ def Snapshot(): #sensor.skip_frames(time = 10) #time.sleep(100) #img = sensor.snapshot() img = sensor.snapshot().rotation_corr(x_rotation = 0.0, \ y_rotation = 0.0, \ z_rotation = -90, \ x_translation = 0, \ y_translation = 0, \ zoom = 1.0) # Run the kernel on every pixel of the image. img.laplacian(1, sharpen=True) img.draw_rectangle(40, 10, 80, 100, color = (255, 255, 255), thickness = 2, fill = False) lcd.display(img) # Take a picture and display the image. """ 拍照并保存匹配比较空板函数 """ def SaveImage0(): pyb.LED(RED_LED_PIN).on() sensor.skip_frames(time = 1000) # Give the user time to get ready. pyb.LED(RED_LED_PIN).off() pyb.LED(BLUE_LED_PIN).on() print("You're on camera!") #img = sensor.snapshot() img = sensor.snapshot().rotation_corr(x_rotation = 0.0, \ y_rotation = 0.0, \ z_rotation = -90, \ x_translation = 0, \ y_translation = 0, \ zoom = 1.0) # Run the kernel on every pixel of the image. img.laplacian(1, sharpen=True) img.save("s0.pgm",(40, 10, 80, 100)) # or "example.bmp" (or others) pyb.LED(BLUE_LED_PIN).off() print("Done! Reset the camera to see the saved image.") uart.write("r") """ 拍照并保存匹配比较正模板函数 """ def SaveImage1(): pyb.LED(RED_LED_PIN).on() sensor.skip_frames(time = 1000) # Give the user time to get ready. pyb.LED(RED_LED_PIN).off() pyb.LED(BLUE_LED_PIN).on() print("You're on camera!") #img = sensor.snapshot() img = sensor.snapshot().rotation_corr(x_rotation = 0.0, \ y_rotation = 0.0, \ z_rotation = -90, \ x_translation = 0, \ y_translation = 0, \ zoom = 1.0) # Run the kernel on every pixel of the image. img.laplacian(1, sharpen=True) img.save("s1.pgm",(40, 10, 80, 100)) # or "example.bmp" (or others) pyb.LED(BLUE_LED_PIN).off() print("Done! Reset the camera to see the saved image.") uart.write("s") """ 拍照并保存匹配比较反模板函数 """ def SaveImage2(): pyb.LED(RED_LED_PIN).on() sensor.skip_frames(time = 1000) # Give the user time to get ready. pyb.LED(RED_LED_PIN).off() pyb.LED(BLUE_LED_PIN).on() print("You're on camera!") #img = sensor.snapshot() img = sensor.snapshot().rotation_corr(x_rotation = 0.0, \ y_rotation = 0.0, \ z_rotation = -90, \ x_translation = 0, \ y_translation = 0, \ zoom = 1.0) # Run the kernel on every pixel of the image. img.laplacian(1, sharpen=True) img.save("s2.pgm",(40, 10, 80, 100)) # or "example.bmp" (or others) pyb.LED(BLUE_LED_PIN).off() print("Done! Reset the camera to see the saved image.") uart.write("t") """ 按钮处理函数 """ """ def ButtonProcess(): global g_pin7ScanSta #global g_pin8ScanSta if g_pin7ScanSta == 0: if pin7.value()==0: g_pin7ScanSta = 1 SaveImage() else: if pin7.value()==1: g_pin7ScanSta = 0 """ """ Main Loop """ global g_timer_100ms g_timer_100ms = 0 global g_timer_20ms g_timer_20ms = 0 global g_uart_msg global g_uart_half_msg g_uart_half_msg = 0 while (True): #sensor.skip_frames(time = 500) time.sleep(1) # Main loop 执行周期为1ms #UART_RecvProcess() g_timer_100ms += 1 if g_timer_100ms == 100: g_timer_100ms = 0 Snapshot() #ButtonProcess() #for i in range(uart.any()): #UART_RecvProcess(uart.readchar()) if uart.any() >= 17: g_uart_msg = uart.readline().decode().strip() if len(g_uart_msg) == 17 and g_uart_msg[:1] == 'A': a = g_uart_msg.split(',') g_uart_rxbuf[0] = int(a[1]) g_uart_rxbuf[1] = int(a[2]) g_uart_rxbuf[2] = int(a[3]) g_uart_rxbuf[3] = int(a[4]) #print(g_uart_rxbuf[0]) #print(g_uart_rxbuf[1]) #print(g_uart_rxbuf[2]) #print(g_uart_rxbuf[3]) UART_RecvProcess()